
Profile

|
Prof. Dr. Jan Bender |
Publications
Simulation Methods for Multiphysics Phenomena in Visual Computing

Physics simulation is a cornerstone of many computer graphics applications, ranging from video games and virtual reality to visual effects and computational design. The number of techniques for physically-based modeling and animation has thus skyrocketed over the past few decades, facilitating the simulation of a wide variety of materials and physical phenomena. These course notes provide an in-depth introduction to multiphysics simulation methods for computer graphics, covering the mathematical foundations, key algorithms, and practical considerations behind the most widely used approaches. We focus on methods developed by the computer graphics community for simulating various physical phenomena and materials -- including rigid and deformable bodies, fluids, and granular materials -- as well as the interactions between them. For each method, we present the underlying mathematical framework with detailed derivations and discuss how different materials and coupling strategies fit into the formulation. A selection of software frameworks that offer out-of-the-box multiphysics modeling capabilities is also presented. Finally, we touch on emerging trends in physics-based animation, including machine learning-based methods which have become increasingly popular in recent years.
@inproceedings{LJFB2026,
booktitle = {Eurographics 2026 - Tutorials},
title = {{Simulation Methods for Multiphysics Phenomena in Visual Computing}},
author = {Löschner, Fabian and Jeske, Stefan Rhys and Fernández-Fernández, José Antonio and Bender, Jan},
year = {2026},
publisher = {The Eurographics Association},
ISSN = {1017-4656},
ISBN = {978-3-03868-267-7},
DOI = {10.2312/egt.20261002}
}
Progressively Projected Newton’s Method

Newton's Method is widely used to find the solution of complex non-linear simulation problems. To guarantee a descent direction, it is common practice to clamp the negative eigenvalues of each element Hessian prior to assembly — a strategy known as Projected Newton (PN) — but this perturbation often hinders convergence. In this work, we observe that projecting only a small subset of element Hessians is sufficient to secure a descent direction. Building on this insight, we introduce Progressively Projected Newton (PPN), a novel variant of Newton's Method that uses the current iterate's residual to cheaply determine the subset of element Hessians to project. The benefit is twofold: most eigendecompositions are avoided and the global Hessian remains closer to its original form, reducing the number of Newton iterations. We compare PPN with PN and Project-on-Demand Newton (PDN) in a comprehensive set of experiments covering contact-free and contact-rich deformables, co-dimensional and rigid-body simulations, and a range of time step sizes, tolerances and resolutions. PPN reduces the amount of element projections in dynamic simulations by one order of magnitude while simultaneously improving convergence, consistently being the fastest solver in our benchmark.
» Show BibTeX
@article{FLB2026,
title={Progressively Projected Newton's Method},
author={José Antonio Fernández-Fernández and Fabian Löschner and Jan Bender},
year = {2026},
journal = {Computer Graphics Forum (Eurographics)},
volume = {45},
number = {2}
}
HYVE: Hybrid Vertex Encoder for Neural Distance Fields

Neural shape representation generally refers to representing 3D geometry using neural networks, e.g., computing a signed distance or occupancy value at a specific spatial position. In this paper we present a neural-network architecture suitable for accurate encoding of 3D shapes in a single forward pass. Our architecture is based on a multi-scale hybrid system incorporating graph-based and voxel-based components, as well as a continuously differentiable decoder. The hybrid system includes a novel way of voxelizing point-based features in neural networks by projecting the point "feature-field" onto a grid. This projection is insensitive to local point density, and we show that it can be used to obtain smoother and more detailed reconstructions, in particular when combined with oriented point clouds as input. Our architecture also requires only a single forward pass, instead of the latent-code optimization used in auto-decoder methods. Furthermore, our network is trained to solve the well-established eikonal equation and only requires knowledge of the zero-level set for training and inference. We additionally propose a modification to the aforementioned loss function for the case that surface normals are not well defined, e.g., in the context of non-watertight surfaces and non-manifold geometry. Overall, our method consistently outperforms other baselines on the surface reconstruction task across a wide variety of datasets, while being more computationally efficient and requiring fewer parameters.
@article{jeskeHYVEHybridVertex2026,
title = {{{HYVE}}: {{Hybrid Vertex Encoder}} for {{Neural Distance Fields}}},
shorttitle = {{{HYVE}}},
author = {Jeske, Stefan R. and Klein, Jonathan and Michels, Dominik and Bender, Jan},
year = 2026,
journal = {IEEE Transactions on Visualization and Computer Graphics},
doi = {10.1109/TVCG.2026.3658870},
copyright = {https://ieeexplore.ieee.org/Xplorehelp/downloads/license-information/IEEE.html}
}
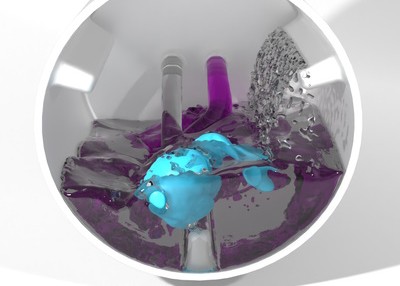
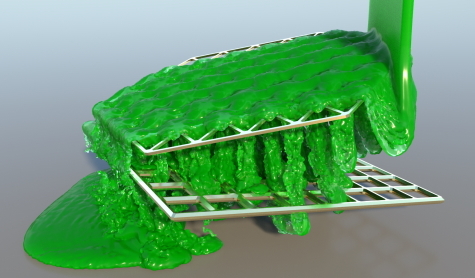
Implicit Incompressible Porous Flow using SPH

We present a novel implicit porous flow solver using SPH, which maintains fluid incompressibility and is able to model a wide range of scenarios, driven by strongly coupled solid-fluid interaction forces. Many previous SPH porous flow methods reduce particle volumes as they transition across the solid-fluid interface, resulting in significant stability issues. We instead allow fluid and solid to overlap by deriving a new density estimation. This further allows us to extend SPH pressure solvers to take local porosity into account and results in strict enforcement of incompressibility. As a result, we can simulate porous flow using physically consistent pressure forces between fluid and solid. In contrast to previous SPH porous flow methods, which use explicit forces for internal fluid flow, we employ implicit non-pressure forces. These we solve as a linear system and strongly couple with fluid viscosity and solid elasticity. We capture the most common effects observed in porous flow, namely drag, buoyancy and capillary action due to adhesion. To achieve elastic behavior change based on local fluid saturation, such as bloating or softening, we propose an extension to the elasticity model. We demonstrate the efficacy of our model with various simulations that showcase the different aspects of porous flow behavior. To summarize, our system of strongly coupled non-pressure forces and enforced incompressibility across overlapping phases allows us to naturally model and stably simulate complex porous interactions.
» Show BibTeX
@article{BWJB25,
title = {Implicit {{Incompressible Porous Flow}} Using {{SPH}}},
author = {B{\"o}ttcher, Timna and Westhofen, Lukas and Jeske, Stefan Rhys and Bender, Jan},
year = 2025,
month = dec,
journal = {ACM Transactions on Graphics},
volume = {44},
number = {6},
doi = {10.1145/3763325}
}
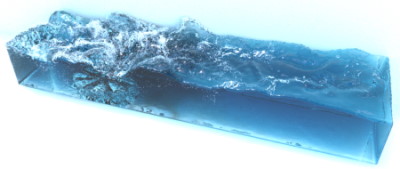
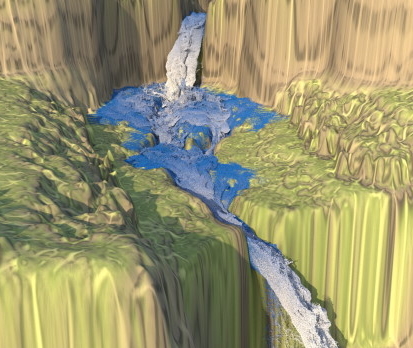
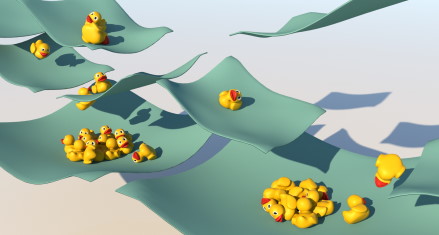
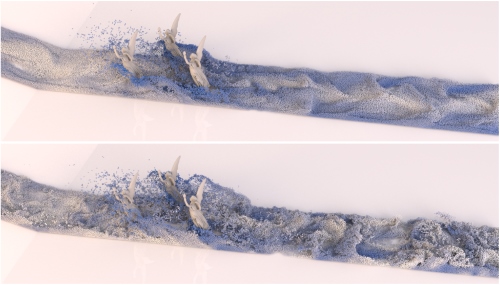
Adaptive Phase-Field-FLIP for Very Large Scale Two-Phase Fluid Simulation

Capturing the visually compelling features of large-scale water phenomena,such as the spray clouds of crashing waves, stormy seas, or waterfalls, involves simulating not only the water but also the motion of the air interacting with it. However, current solutions in the visual effects industry still largely rely on single-phase solvers and non-physical “white-water” heuristics. To address these limitations, we present Phase-Field-FLIP (PF-FLIP), a hybrid Eulerian/Lagrangian method for the fully physics-based simulation of very large-scale, highly turbulent multiphase flows at high Reynolds numbers and high fluid density contrasts. PF-FLIP transports mass and momentum in a consistent, non-dissipative manner and, unlike most existing multiphase approaches, does not require a surface reconstruction step. Furthermore, we employ spatial adaptivity across all critical components of the simulation algorithm, including the pressure Poisson solver. We augment PF-FLIP with a dual multiresolution scheme that couples an efficient treeless adaptive grid with adaptive particles, along with a fast adaptive Poisson solver tailored for high-density-contrast multiphase flows. Our method enables the simulation of two-phase flow scenarios with a level of physical realism and detail previously unattainable in graphics, supporting billions of particles and adaptive 3D resolutions with thousands of grid cells per dimension on a single workstation.
» Show BibTeX
@article{BBT25,
author = {Braun, Bernhard and Bender, Jan and Thuerey, Nils},
title = {Adaptive Phase-Field-FLIP for Very Large Scale Two-Phase Fluid Simulation},
year = {2025},
publisher = {Association for Computing Machinery},
volume = {44},
number = {4},
url = {https://doi.org/10.1145/3730854},
doi = {10.1145/3730854},
journal = {ACM Trans. Graph.},
month = jul,
articleno = {42},
numpages = {23},
keywords = {turbulent flows, large density ratio, two-phase flows, FLIP, spatial adaptivity, large-scale fluid simulation}
}
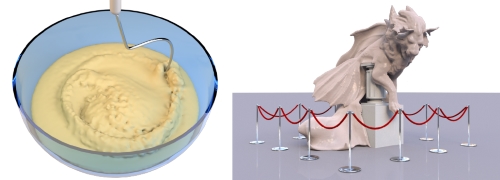
SymX: Energy-based Simulation from Symbolic Expressions

Optimization time integrators are effective at solving complex multi-physics problems including deformable solids with non-linear material models, contact with friction, strain limiting, etc. For challenging problems, Newton-type optimizers are often used, which necessitates first- and second-order derivatives of the global non-linear objective function. Manually differentiating, implementing, testing, optimizing, and maintaining the resulting code is extremely time-consuming, error-prone, and precludes quick changes to the model, even when using tools that assist with parts of such pipeline.
We present SymX, an open source framework that computes the required derivatives of the different energy contributions by symbolic differentiation, generates optimized code, compiles it on-the-fly, and performs the global assembly. The user only has to provide the symbolic expression of each energy for a single representative element in its corresponding discretization and our system will determine the assembled derivatives for the whole simulation. We demonstrate the versatility of SymX in complex simulations featuring different non-linear materials, high-order finite elements, rigid body systems, adaptive discretizations, frictional contact, and coupling of multiple interacting physical systems.
SymX’s derivatives offer performance on par with SymPy, an established off-the-shelf symbolic engine, and produces simulations at least one order of magnitude faster than TinyAD, an alternative state-of-the-art integral solution.
» Show BibTeX
@Article{FLW25,
author = {Fern\'{a}ndez-Fern\'{a}ndez, Jos\'{e} Antonio and L\"{o}schner, Fabian and Westhofen, Lukas and Longva, Andreas and Bender, Jan},
title = {SymX: Energy-based Simulation from Symbolic Expressions},
year = {2025},
issue_date = {February 2026},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
volume = {45},
number = {1},
issn = {0730-0301},
url = {https://doi.org/10.1145/3764928},
doi = {10.1145/3764928},
journal = {ACM Trans. Graph.},
month = oct,
articleno = {5},
numpages = {19},
keywords = {Physically-based simulation, symbolic differentiation, optimization time integration}
}
Interactive Facial Animation: Enhancing Facial Rigs With Real-Time Shell And Contact Simulation

Demand for high-quality virtual 3D characters continues to grow in both entertainment and communication, and with it, the desire for interactive avatars. This presents unique challenges for high-fidelity interactive solutions that must be quick to set up, efficient to run in real-time on consumer hardware, and work well, not only on human characters, but also on fantastical and heavily stylized ones. We present Interactive Facial Animation (IFA), a novel approach to augment facial animation rigs with shell simulation and contact without requiring anatomical priors or artist intervention. Our method uses an efficient shell model that tracks the output of a face rig in real-time and incorporates realistic contact. By designing our shell model to be differentiable, we can use inverse simulation to reconstruct realistic non-uniform stiffness that captures both stiff (ears, nose) and soft (cheeks, lips) areas, based on the rig’s deformation space. The reconstruction process imposes hard limits on acceptable errors, which ensures that IFA preserves the resolution and expressiveness of the source material, a common shortcoming in many face simulation pipelines. With performance in mind, we demonstrate IFA using a variant of the Fast Mass-Springs method. However, the presented concept can be realized with any differentiable physics solver that provides reliable convergence. We showcase our method in four different character rigs, achieving simulation update runtimes between 0.39 and 1.27 milliseconds (787-2564 FPS) on a single CPU thread. Unlike existing methods that require lengthy preparation times, our pipeline can be ready to use within minutes, also on the CPU.
» Show BibTeX
@article{fernandez-fernandezInteractiveFacialAnimation2025,
title = {Interactive {{Facial Animation}}: {{Enhancing Facial Rigs With Real-Time Shell And Contact Simulation}}},
author = {{Fern{\'a}ndez-Fern{\'a}ndez}, Jos{\'e} Antonio and Goldade, Ryan and Kavan, Ladislav and Bender, Jan and Herholz, Philipp},
year = {2025},
journal = {Proceedings of the ACM on Computer Graphics and Interactive Techniques},
}
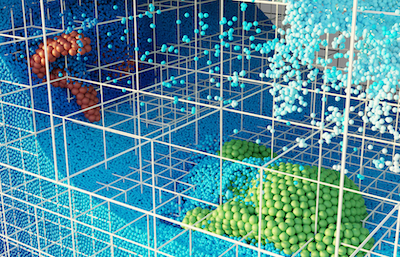
Multiphysics Simulation Methods in Computer Graphics
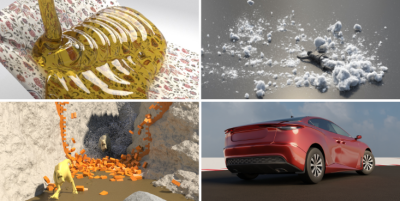
Physics simulation is a cornerstone of many computer graphics applications, ranging from video games and virtual reality to visual effects and computational design. The number of techniques for physically-based modeling and animation has thus skyrocketed over the past few decades, facilitating the simulation of a wide variety of materials and physical phenomena. This report captures the state-of-the-art of multiphysics simulation for computer graphics applications. Although a lot of work has focused on simulating individual phenomena, here we put an emphasis on methods developed by the computer graphics community for simulating various physical phenomena and materials, as well as the interactions between them. These include combinations of discretization schemes, mathematical modeling frameworks, and coupling techniques. For the most commonly used methods we provide an overview of the state-of-the-art and deliver valuable insights into the various approaches. A selection of software frameworks that offer out-of-the-box multiphysics modeling capabilities is also presented. Finally, we touch on emerging trends in physics-based animation that affect multiphysics simulation, including machine learning-based methods which have become increasingly popular in recent years.
@article{HJL*25,
journal = {Computer Graphics Forum},
title = {{Multiphysics Simulation Methods in Computer Graphics}},
author = {Holz, Daniel and Jeske, Stefan Rhys and L\"oschner, Fabian and Bender, Jan and Yang, Yin and Andrews, Sheldon},
year = {2025},
publisher = {The Eurographics Association and John Wiley & Sons Ltd.},
ISSN = {1467-8659},
DOI = {10.1111/cgf.70082},
volume = {44},
number = {2}
}
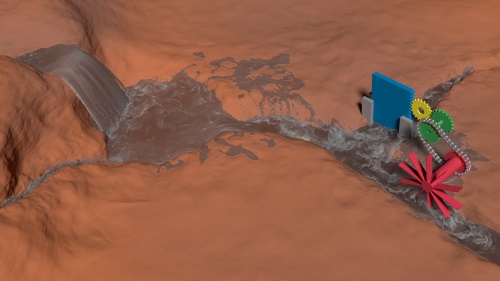
A Smoothed Particle Hydrodynamics framework for fluid simulation in robotics

Simulation is a core component of robotics workflows that can shed light on the complex interplay between a physical body, the environment and sensory feedback mechanisms in silico. To this goal several simulation methods, originating in rigid body dynamics and in continuum mechanics have been employed, enabling the simulation of a plethora of phenomena such as rigid/soft body dynamics, fluid dynamics, muscle simulation as well as sensor and actuator dynamics. The physics engines commonly employed in robotics simulation focus on rigid body dynamics, whereas continuum mechanics methods excel on the simulation of phenomena where deformation plays a crucial role, keeping the two fields relatively separate. Here, we propose a shift of paradigm that allows for the accurate simulation of fluids in interaction with rigid bodies within the same robotics simulation framework, based on the continuum mechanics-based Smoothed Particle Hydrodynamics method. The proposed framework is useful for simulations such as swimming robots with complex geometries, robots manipulating fluids and even robots emitting highly viscous materials such as the ones used for 3D printing. Scenarios like swimming on the surface, air-water transitions, locomotion on granular media can be natively simulated within the proposed framework. Firstly, we present the overall architecture of our framework and give examples of a concrete software implementation. We then verify our approach by presenting one of the first of its kind simulation of self-propelled swimming robots with a smooth particle hydrodynamics method and compare our simulations with real experiments. Finally, we propose a new category of simulations that would benefit from this approach and discuss ways that the sim-to-real gap could be further reduced.
@article{AAB+24,
title = {A smoothed particle hydrodynamics framework for fluid simulation in robotics},
journal = {Robotics and Autonomous Systems},
volume = {185},
year = {2025},
issn = {0921-8890},
doi = {https://doi.org/10.1016/j.robot.2024.104885},
url = {https://www.sciencedirect.com/science/article/pii/S0921889024002690},
author = {Emmanouil Angelidis and Jonathan Arreguit and Jan Bender and Patrick Berggold and Ziyuan Liu and Alois Knoll and Alessandro Crespi and Auke J. Ijspeert}
}
STARK: A Unified Framework for Strongly Coupled Simulation of Rigid and Deformable Bodies with Frictional Contact

The use of simulation in robotics is increasingly widespread for the purpose of testing, synthetic data generation and skill learning. A relevant aspect of simulation for a variety of robot applications is physics-based simulation of robot-object interactions. This involves the challenge of accurately modeling and implementing different mechanical systems such as rigid and deformable bodies as well as their interactions via constraints, contact or friction. Most state-of-the-art physics engines commonly used in robotics either cannot couple deformable and rigid bodies in the same framework, lack important systems such as cloth or shells, have stability issues in complex friction-dominated setups or cannot robustly prevent penetrations. In this paper, we propose a framework for strongly coupled simulation of rigid and deformable bodies with focus on usability, stability, robustness and easy access to state-of-the-art deformation and frictional contact models. Our system uses the Finite Element Method (FEM) to model deformable solids, the Incremental Potential Contact (IPC) approach for frictional contact and a robust second order optimizer to ensure stable and penetration-free solutions to tight tolerances. It is a general purpose framework, not tied to a particular use case such as grasping or learning, it is written in C++ and comes with a Python interface. We demonstrate our system’s ability to reproduce complex real-world experiments where a mobile vacuum robot interacts with a towel on different floor types and towel geometries. Our system is able to reproduce 100% of the qualitative outcomes observed in the laboratory environment. The simulation pipeline, named Stark (the German word for strong, as in strong coupling) is made open-source.
» Show BibTeX
@INPROCEEDINGS{FLL+24,
author={Fernández-Fernández, José Antonio and Lange, Ralph and Laible, Stefan and Arras, Kai O. and Bender, Jan},
booktitle={2024 IEEE International Conference on Robotics and Automation (ICRA)},
title={STARK: A Unified Framework for Strongly Coupled Simulation of Rigid and Deformable Bodies with Frictional Contact},
year={2024}
}
Implicit frictional dynamics with soft constraints
Dynamics simulation with frictional contacts is important for a wide range of applications, from cloth simulation to object manipulation. Recent methods using smoothed lagged friction forces have enabled robust and differentiable simulation of elastodynamics with friction. However, the resulting frictional behavior can be inaccurate and may not converge to analytic solutions. Here we evaluate the accuracy of lagged friction models in comparison with implicit frictional contact systems. We show that major inaccuracies near the stick-slip threshold in such systems are caused by lagging of friction forces rather than by smoothing the Coulomb friction curve. Furthermore, we demonstrate how systems involving implicit or lagged friction can be correctly used with higher-order time integration and highlight limitations in earlier attempts. We demonstrate how to exploit forward-mode automatic differentiation to simplify and, in some cases, improve the performance of the inexact Newton method. Finally, we show that other complex phenomena can also be simulated effectively while maintaining smoothness of the entire system. We extend our method to exhibit stick-slip frictional behavior and preserve volume on compressible and nearly-incompressible media using soft constraints.
» Show BibTeX
@ARTICLE{LLA*24,
author={Larionov, Egor and Longva, Andreas and Ascher, Uri M. and Bender, Jan and Pai, Dinesh K.},
title={Implicit frictional dynamics with soft constraints},
journal={IEEE Transactions on Visualization and Computer Graphics},
year={2024},
volume={},
number={},
pages={1-12},
doi={10.1109/TVCG.2024.3437417}
}
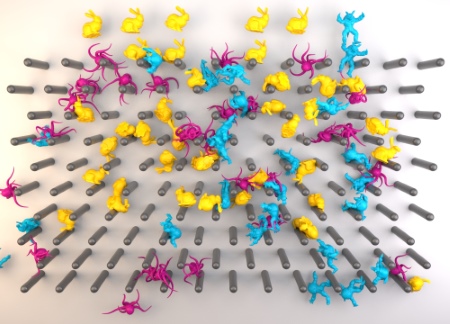
Strongly Coupled Simulation of Magnetic Rigid Bodies

We present a strongly coupled method for the robust simulation of linear magnetic rigid bodies. Our approach describes the magnetic effects as part of an incremental potential function. This potential is inserted into the reformulation of the equations of motion for rigid bodies as an optimization problem. For handling collision and friction, we lean on the Incremental Potential Contact (IPC) method. Furthermore, we provide a novel, hybrid explicit / implicit time integration scheme for the magnetic potential based on a distance criterion. This reduces the fill-in of the energy Hessian in cases where the change in magnetic potential energy is small, leading to a simulation speedup without compromising the stability of the system. The resulting system yields a strongly coupled method for the robust simulation of magnetic effects. We showcase the robustness in theory by analyzing the behavior of the magnetic attraction against the contact resolution. Furthermore, we display stability in practice by simulating exceedingly strong and arbitrarily shaped magnets. The results are free of artifacts like bouncing for time step sizes larger than with the equivalent weakly coupled approach. Finally, we showcase the utility of our method in different scenarios with complex joints and numerous magnets.
» Show BibTeX
@article{WFJB24,
author = {Westhofen, Lukas and Fernández-Fernández, José Antonio and Jeske, Stefan Rhys and Bender, Jan},
title = {Strongly Coupled Simulation of Magnetic Rigid Bodies},
journal = {Computer Graphics Forum},
volume = {43},
number = {8},
doi = {https://doi.org/10.1111/cgf.15185},
url = {https://onlinelibrary.wiley.com/doi/abs/10.1111/cgf.15185},
year = {2024}
}
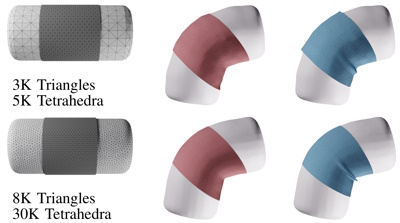
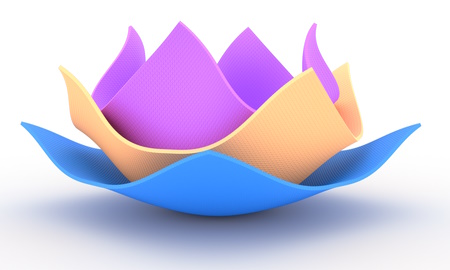
Curved Three-Director Cosserat Shells with Strong Coupling
Continuum-based shell models are an established approach for the simulation of thin deformables in computer graphics. However, existing research in physically-based animation is mostly focused on shear-rigid Kirchhoff-Love shells. In this work we explore three-director Cosserat (micropolar) shells which introduce additional rotational degrees of freedom. This microrotation field models transverse shearing and in-plane drilling rotations. We propose an incremental potential formulation of the Cosserat shell dynamics which allows for strong coupling with frictional contact and other physical systems. We evaluate a corresponding finite element discretization for non-planar shells using second-order elements which alleviates shear-locking and permits simulation of curved geometries. Our formulation and the discretization, in particular of the rotational degrees of freedom, is designed to integrate well with typical simulation approaches in physically-based animation. While the discretization of the rotations requires some care, we demonstrate that they do not pose significant numerical challenges in Newton’s method. In our experiments we also show that the codimensional shell model is consistent with the respective three-dimensional model. We qualitatively compare our formulation with Kirchhoff-Love shells and demonstrate intriguing use cases for the additional modes of control over dynamic deformations offered by the Cosserat model such as directly prescribing rotations or angular velocities and influencing the shell’s curvature.
» Show BibTeX
@article{LFJB24,
author = {L\"oschner, Fabian and Fernández-Fernández, José Antonio and Jeske, Stefan Rhys and Bender, Jan},
title = {Curved Three-Director Cosserat Shells with Strong Coupling},
journal = {Computer Graphics Forum},
volume = {43},
number = {8},
doi = {https://doi.org/10.1111/cgf.15183},
url = {https://onlinelibrary.wiley.com/doi/abs/10.1111/cgf.15183},
year = {2024}
}
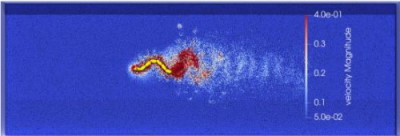
Simulation of wire metal transfer in the cold metal transfer (CMT) variant of gas metal arc welding using the smoothed particle hydrodynamics (SPH) approach
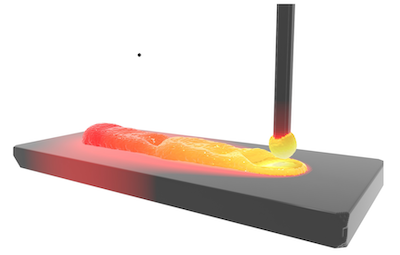
Cold metal transfer (CMT) is a variant of gas metal arc welding (GMAW) in which the molten metal of the wire is transferred to the weld pool mainly in the short-circuit phase. A special feature here is that the wire is retracted during this strongly controlled welding process. This allows precise and spatter-free formation of the weld seams with lower energy input. To simulate this process, a model based on the particle-based smoothed particle hydrodynamics (SPH) method is developed. This method provides a native solution for the mass and heat transfer. A simplified surrogate model was implemented as an arc heat source for welding simulation. This welding simulation model based on smoothed particle hydrodynamics method was augmented with surface effects, the Joule heating of the wire, and the effect of the electromagnetic forces. The model of metal transfer in the cold metal transfer process shows good qualitative agreement with real experiments.
@article{MWW+24,
author = {Mokrov, O. and Warkentin, S. and Westhofen, L. and Jeske, S. and Bender, J. and Sharma, R. and Reisgen, U.},
title = {Simulation of wire metal transfer in the cold metal transfer (CMT) variant of gas metal arc welding using the smoothed particle hydrodynamics (SPH) approach},
journal = {Materialwissenschaft und Werkstofftechnik},
volume = {55},
number = {1},
pages = {62-71},
keywords = {cold metal transfer (CMT), free surface deformation, gas metal arc welding (GMAW), simulation, smoothed particle hydrodynamics (SPH), geglätteter Partikel-basierter hydrodynamischer Ansatz (SPH), Kaltmetalltransfer (CMT), Metallschutzgasschweißens, Oberflächenverformung, Simulation},
doi = {https://doi.org/10.1002/mawe.202300166},
year = {2024}
}
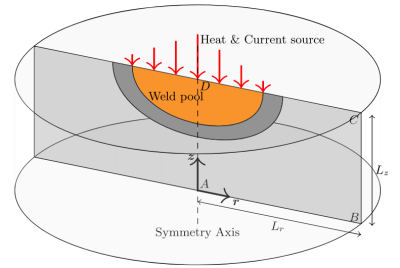
Ray tracing method with implicit surface detection for smoothed particle hydrodynamics-based laser beam welding simulations
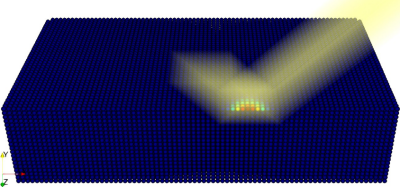
An important prerequisite for process simulations of laser beam welding is the accurate depiction of the surface energy distribution. This requires capturing the optical effects of the laser beam occurring at the free surface. In this work, a novel optics ray tracing scheme is proposed which can handle the reflection and absorption dynamics associated with laser beam welding. Showcasing the applicability of the approach, it is coupled with a novel surface detection algorithm based on smoothed particle hydrodynamics (SPH), which offers significant performance benefits over reconstruction-based methods. The results are compared to state-of-the-art experimental results in laser beam welding, for which an excellent correspondence in the case of the energy distributions inside capillaries is shown.
@article{WKB+24,
author = {Westhofen, L. and Kruska, J. and Bender, J. and Warkentin, S. and Mokrov, O. and Sharma, R. and Reisgen, U.},
title = {Ray tracing method with implicit surface detection for smoothed particle hydrodynamics-based laser beam welding simulations},
journal = {Materialwissenschaft und Werkstofftechnik},
volume = {55},
number = {1},
pages = {40-52},
keywords = {heat transfer, hydrodynamics, laser beam welding, ray optics, ray tracing, smoothed particle, geglättete Partikel, hydrodynamische, Laserstrahlschweißen, Strahloptik, Strahlverfolgung, Wärmetransfer},
doi = {https://doi.org/10.1002/mawe.202300161},
year = {2024}
}
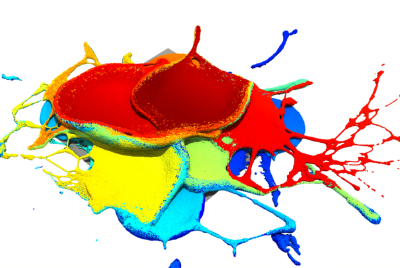
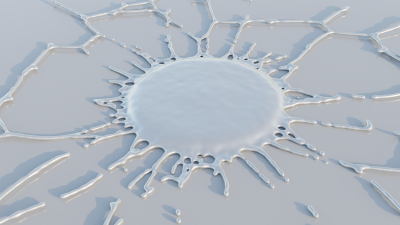
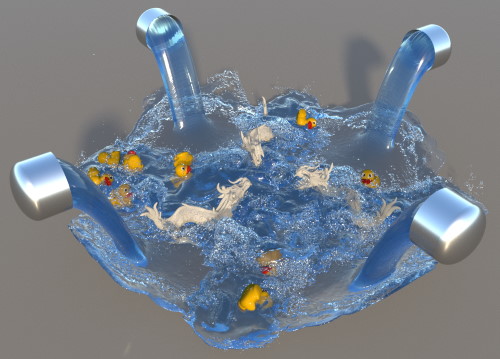
Implicit Surface Tension for SPH Fluid Simulation

The numerical simulation of surface tension is an active area of research in many different fields of application and has been attempted using a wide range of methods. Our contribution is the derivation and implementation of an implicit cohesion force based approach for the simulation of surface tension effects using the Smoothed Particle Hydrodynamics (SPH) method. We define a continuous formulation inspired by the properties of surface tension at the molecular scale which is spatially discretized using SPH. An adapted variant of the linearized backward Euler method is used for time discretization, which we also strongly couple with an implicit viscosity model. Finally, we extend our formulation with adhesion forces for interfaces with rigid objects.
Existing SPH approaches for surface tension in computer graphics are mostly based on explicit time integration, thereby lacking in stability for challenging settings. We compare our implicit surface tension method to these approaches and further evaluate our model on a wider variety of complex scenarios, showcasing its efficacy and versatility. Among others, these include but are not limited to simulations of a water crown, a dripping faucet and a droplet-toy.
» Show BibTeX
@article{Jeske2023,
title = {Implicit {{Surface Tension}} for {{SPH Fluid Simulation}}},
author = {Jeske, Stefan Rhys and Westhofen, Lukas and L{\"o}schner, Fabian and {Fern{\'a}ndez-Fern{\'a}ndez}, Jos{\'e} Antonio and Bender, Jan},
year = {2023},
month = nov,
journal = {ACM Transactions on Graphics},
volume = {43},
number = {1},
issn = {0730-0301},
doi = {10.1145/3631936},
urldate = {2023-11-07},
keywords = {adhesion,cohesion,fluid simulation,smoothed particle hydrodynamics,surface tension},
}
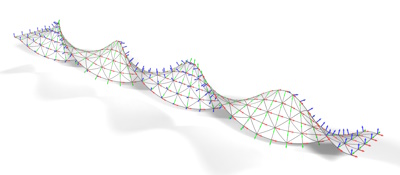
Micropolar Elasticity in Physically-Based Animation
We explore micropolar materials for the simulation of volumetric deformable solids. In graphics, micropolar models have only been used in the form of one-dimensional Cosserat rods, where a rotating frame is attached to each material point on the one-dimensional centerline. By carrying this idea over to volumetric solids, every material point is associated with a microrotation, an independent degree of freedom that can be coupled to the displacement through a material's strain energy density. The additional degrees of freedom give us more control over bending and torsion modes of a material. We propose a new orthotropic micropolar curvature energy that allows us to make materials stiff to bending in specific directions.
For the simulation of dynamic micropolar deformables we propose a novel incremental potential formulation with a consistent FEM discretization that is well suited for the use in physically-based animation. This allows us to easily couple micropolar deformables with dynamic collisions through a contact model inspired from the Incremental Potential Contact (IPC) approach. For the spatial discretization with FEM we discuss the challenges related to the rotational degrees of freedom and propose a scheme based on the interpolation of angular velocities followed by quaternion time integration at the quadrature points.
In our evaluation we validate the consistency and accuracy of our discretization approach and demonstrate several compelling use cases for micropolar materials. This includes explicit control over bending and torsion stiffness, deformation through prescription of a volumetric curvature field and robust interaction of micropolar deformables with dynamic collisions.
» Show BibTeX
@article{LFJ+23,
author = {L\"{o}schner, Fabian and Fern\'{a}ndez-Fern\'{a}ndez, Jos\'{e} Antonio and Jeske, Stefan Rhys and Longva, Andreas and Bender, Jan},
title = {Micropolar Elasticity in Physically-Based Animation},
year = {2023},
issue_date = {August 2023},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
volume = {6},
number = {3},
url = {https://doi.org/10.1145/3606922},
doi = {10.1145/3606922},
journal = {Proceedings of the ACM on Computer Graphics and Interactive Techniques},
month = {aug},
articleno = {46},
numpages = {24}
}
A comparison of linear consistent correction methods for first-order SPH derivatives
A well-known issue with the widely used Smoothed Particle Hydrodynamics (SPH) method is the neighborhood deficiency. Near the surface, the SPH interpolant fails to accurately capture the underlying fields due to a lack of neighboring particles. These errors may introduce ghost forces or other visual artifacts into the simulation.
In this work we investigate three different popular methods to correct the first-order spatial derivative SPH operators up to linear accuracy, namely the Kernel Gradient Correction (KGC), Moving Least Squares (MLS) and Reproducing Kernel Particle Method (RKPM). We provide a thorough, theoretical comparison in which we remark strong resemblance between the aforementioned methods. We support this by an analysis using synthetic test scenarios. Additionally, we apply the correction methods in simulations with boundary handling, viscosity, surface tension, vorticity and elastic solids to showcase the reduction or elimination of common numerical artifacts like ghost forces. Lastly, we show that incorporating the correction algorithms in a state-of-the-art SPH solver only incurs a negligible reduction in computational performance.
» Show BibTeX
@article{WJB23,
author = {Westhofen, Lukas and Jeske, Stefan and Bender, Jan},
title = {A Comparison of Linear Consistent Correction Methods for First-Order SPH Derivatives},
year = {2023},
issue_date = {August 2023},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
volume = {6},
number = {3},
url = {https://doi.org/10.1145/3606933},
doi = {10.1145/3606933},
journal = {Proceedings of the ACM on Computer Graphics and Interactive Techniques (SCA)},
month = {aug},
articleno = {48},
numpages = {20}
}
Consistent SPH Rigid-Fluid Coupling

A common way to handle boundaries in SPH fluid simulations is to sample the surface of the boundary geometry using particles. These boundary particles are assigned the same properties as the fluid particles and are considered in the pressure force computation to avoid a penetration of the boundary. However, the pressure solver requires a pressure value for each particle. These are typically not computed for the boundary particles due to the computational overhead. Therefore, several strategies have been investigated in previous works to obtain boundary pressure values. A popular, simple technique is pressure mirroring, which mirrors the values from the fluid particles. This method is efficient, but may cause visual artifacts. More complex approaches like pressure extrapolation aim to avoid these artifacts at the cost of computation time.
We introduce a constraint-based derivation of Divergence-Free SPH (DFSPH) --- a common state-of-the-art pressure solver. This derivation gives us new insights on how to integrate boundary particles in the pressure solve without the need of explicitly computing boundary pressure values. This yields a more elegant formulation of the pressure solver that avoids the aforementioned problems.
» Show BibTeX
@inproceedings {BWJ23,
booktitle = {Vision, Modeling, and Visualization},
title = {{Consistent SPH Rigid-Fluid Coupling}},
author = {Jan Bender and Lukas Westhofen and Stefan Rhys Jeske},
year = {2023},
publisher = {The Eurographics Association},
ISBN = {978-3-03868-232-5},
DOI = {10.2312/vmv.20231244}
}
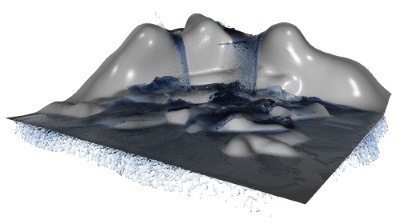
Weighted Laplacian Smoothing for Surface Reconstruction of Particle-based Fluids
Vision, Modeling and Visualization

In physically-based animation, producing detailed and realistic surface reconstructions for rendering is an important part of a simulation pipeline for particle-based fluids. In this paper we propose a post-processing approach to obtain smooth surfaces from "blobby" marching cubes triangulations without visual volume loss or shrinkage of drops and splashes. In contrast to other state-of-the-art methods that often require changes to the entire reconstruction pipeline our approach is easy to implement and less computationally expensive.
The main component is Laplacian mesh smoothing with our proposed feature weights that dampen the smoothing in regions of the mesh with splashes and isolated particles without reducing effectiveness in regions that are supposed to be flat. In addition, we suggest a specialized decimation procedure to avoid artifacts due to low-quality triangle configurations generated by marching cubes and a normal smoothing pass to further increase quality when visualizing the mesh with physically-based rendering. For improved computational efficiency of the method, we outline the option of integrating computation of our weights into an existing reconstruction pipeline as most involved quantities are already known during reconstruction. Finally, we evaluate our post-processing implementation on high-resolution smoothed particle hydrodynamics (SPH) simulations.
» Show BibTeX
@inproceedings {LBJB23,
booktitle = {Vision, Modeling, and Visualization},
title = {{Weighted Laplacian Smoothing for Surface Reconstruction of Particle-based Fluids}},
author = {Fabian L\"{o}schner and Timna B\"{o}ttcher and Stefan Rhys Jeske and Jan Bender},
year = {2023},
publisher = {The Eurographics Association},
ISBN = {978-3-03868-232-5},
DOI = {10.2312/vmv.20231245}
}
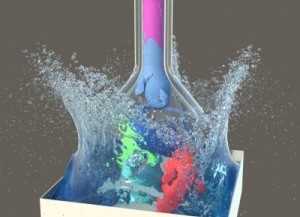
Modeling the Droplet Impact on the Substrate with Surface Preparation in Thermal Spraying with SPH
The properties of thermally sprayed coatings depend heavily on their microstructure. The microstructure is determined by the dynamics of the impact of the droplets on the substrate surface and the subsequent overlapping of the previously solidified and deformed droplets. Substrate preparation prior to spraying ensures strong adhesion of the coating. This includes roughening and preheating of the substrate surface. In the present study, the smoothed particle hydrodynamics (SPH) method is used to model the Al2O3 impact on a preheated substrate and a roughened substrate surface. A semi-implicit enthalpy–porosity method is applied to simulate the solidification process in the mushy zone. In addition, an implicit correction for SPH simulations is used to improve the performance and stability of the simulation. To investigate the dynamics of heat transfer in the contact between the surface and the droplet, the discretization of the substrate is also taken into account. The results show that the studied substrate surface conditions affect the splat morphology and the solidification process. Subsequently, the simulation of multiple droplets for coating formation is also performed and analyzed.
@Article{BHJ+23,
author = {Kirsten Bobzin and Hendrik Heinemann and Kevin Jasutyn and Stefan Rhys Jeske and Jan Bender and Sergej Warkentin and Oleg Mokrov and Rahul Sharma and Uwe Reisgen},
journal = {Journal of Thermal Spray Technology},
title = {Modeling the Droplet Impact on the Substrate with Surface Preparation in Thermal Spraying with SPH},
year = {2023},
month = {jan},
doi = {10.1007/s11666-023-01534-0},
}
Fast Octree Neighborhood Search for SPH Simulations
We present a new octree-based neighborhood search method for SPH simulation. A speedup of up to 1.9x is observed in comparison to state-of-the-art methods which rely on uniform grids. While our method focuses on maximizing performance in fixed-radius SPH simulations, we show that it can also be used in scenarios where the particle support radius is not constant thanks to the adaptive nature of the octree acceleration structure.
Neighborhood search methods typically consist of an acceleration structure that prunes the space of possible particle neighbor pairs, followed by direct distance comparisons between the remaining particle pairs. Previous works have focused on minimizing the number of comparisons. However, in an effort to minimize the actual computation time, we find that distance comparisons exhibit very high throughput on modern CPUs. By permitting more comparisons than strictly necessary, the time spent on preparing and searching the acceleration structure can be reduced, yielding a net positive speedup. The choice of an octree acceleration structure, instead of the uniform grid typically used in fixed-radius methods, ensures balanced computational tasks. This benefits both parallelism and provides consistently high computational intensity for the distance comparisons. We present a detailed account of high-level considerations that, together with low-level decisions, enable high throughput for performance-critical parts of the algorithm.
Finally, we demonstrate the high performance of our algorithm on a number of large-scale fixed-radius SPH benchmarks and show in experiments with a support radius ratio up to 3 that our method is also effective in multi-resolution SPH simulations.
» Show BibTeX
@ARTICLE{ FWL+22,
author= {Jos{\'{e}} Antonio Fern{\'{a}}ndez-Fern{\'{a}}ndez and Lukas Westhofen and Fabian L{\"{o}}schner and Stefan Rhys Jeske and Andreas Longva and Jan Bender },
title= {{Fast Octree Neighborhood Search for SPH Simulations}},
year= {2022},
journal= {ACM Transactions on Graphics (SIGGRAPH Asia)},
publisher= {ACM},
volume = {41},
number = {6},
pages= {13}
}
A Survey on SPH Methods in Computer Graphics
Throughout the past decades, the graphics community has spent major resources on the research and development of physics simulators on the mission to computer-generate behaviors achieving outstanding visual effects or to make the virtual world indistinguishable from reality. The variety and impact of recent research based on Smoothed Particle Hydrodynamics (SPH) demonstrates the concept's importance as one of the most versatile tools for the simulation of fluids and solids. With this survey, we offer an overview of the developments and still-active research on physics simulation methodologies based on SPH that has not been addressed in previous SPH surveys. Following an introduction about typical SPH discretization techniques, we provide an overview over the most used incompressibility solvers and present novel insights regarding their relation and conditional equivalence. The survey further covers recent advances in implicit and particle-based boundary handling and sampling techniques. While SPH is best known in the context of fluid simulation we discuss modern concepts to augment the range of simulatable physical characteristics including turbulence, highly viscous matter, deformable solids, as well as rigid body contact handling. Besides the purely numerical approaches, simulation techniques aided by machine learning are on the rise. Thus, the survey discusses recent data-driven approaches and the impact of differentiable solvers on artist control. Finally, we provide context for discussion by outlining existing problems and opportunities to open up new research directions.
@article {KBST2022,
journal = {Computer Graphics Forum},
title = {{A Survey on SPH Methods in Computer Graphics}},
author = {Koschier, Dan and Bender, Jan and Solenthaler, Barbara and Teschner, Matthias},
year = {2022},
volume ={41},
number = {2},
publisher = {The Eurographics Association and John Wiley & Sons Ltd.},
ISSN = {1467-8659},
DOI = {10.1111/cgf.14508}
}
Gazebo Fluids: SPH-based simulation of fluid interaction with articulated rigid body dynamics
Physical simulation is an indispensable component of robotics simulation platforms that serves as the basis for a plethora of research directions. Looking strictly at robotics, the common characteristic of the most popular physics engines, such as ODE, DART, MuJoCo, bullet, SimBody, PhysX or RaiSim, is that they focus on the solution of articulated rigid bodies with collisions and contacts problems, while paying less attention to other physical phenomena. This restriction limits the range of addressable simulation problems, rendering applications such as soft robotics, cloth simulation, simulation of viscoelastic materials, and fluid dynamics, especially surface swimming, infeasible. In this work, we present Gazebo Fluids, an open-source extension of the popular Gazebo robotics simulator that enables the interaction of articulated rigid body dynamics with particle-based fluid and deformable solid simulation. We implement fluid dynamics and highly viscous and elastic material simulation capabilities based on the Smoothed Particle Hydrodynamics method. We demonstrate the practical impact of this extension for previously infeasible application scenarios in a series of experiments, showcasing one of the first self-propelled robot swimming simulations with SPH in a robotics simulator.
@InProceedings{ABA22,
author = {Emmanouil Angelidis and Jan Bender and Jonathan Arreguit and Lars Gleim and Wei Wang and Cristian Axenie and Alois Knoll and Auke Ijspeert},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
title = {Gazebo Fluids: SPH-based simulation of fluid interaction with articulated rigid body dynamics},
organization={IEEE},
year = {2022}
}
Quantitative Evaluation of SPH in TIG Spot Welding
While the application of the Smoothed Particle Hydrodynamics (SPH) method for the modeling of welding processes has become increasingly popular in recent years, little is yet known about the quantitative predictive capability of this method. We propose a novel SPH model for the simulation of the tungsten inert gas (TIG) spot welding process and conduct a thorough comparison between our SPH implementation and two Finite Element Method (FEM) based models. In order to be able to quantitatively compare the results of our SPH simulation method with grid based methods we additionally propose an improved particle to grid interpolation method based on linear least-squares with an optional hole-filling pass which accounts for missing particles. We show that SPH is able to yield excellent results, especially given the observed deviations between the investigated FEM methods and as such, we validate the accuracy of the method for an industrially relevant engineering application.
@Article{JSS+22,
author = {Stefan Rhys Jeske and Marek Sebastian Simon and Oleksii Semenov and Jan Kruska and Oleg Mokrov and Rahul Sharma and Uwe Reisgen and Jan Bender},
journal = {Computational Particle Mechanics},
title = {Quantitative evaluation of {SPH} in {TIG} spot welding},
year = {2022},
month = {apr},
doi = {10.1007/s40571-022-00465-x},
publisher = {Springer Science and Business Media {LLC}},
}
Application and Benchmark of SPH for Modeling the Impact in Thermal Spraying
The properties of a thermally sprayed coating, such as its durability or thermal conductivity depend on its microstructure, which is in turn directly related to the particle impact process. To simulate this process we present a 3D Smoothed Particle Hydrodynamics (SPH) model, which represents the molten droplet as an incompressible fluid, while a semi-implicit Enthalpy-Porosity method is applied for modeling the phase change during solidification. In addition, we present an implicit correction for SPH simulations, based on well known approaches, from which we can observe improved performance and simulation stability. We apply our SPH method to the impact and solidification of Al2O3 droplets onto a substrate and perform a comprehensive quantitative comparison of our method with the commercial software Ansys Fluent using the Volume of Fluid (VOF) approach, while taking identical physical effects into consideration. The results are evaluated in depth and we discuss the applicability of either method for the simulation of thermal spray deposition. We also evaluate the droplet spread factor given varying initial droplet diameters and compare these results with an analytic expression from previous literature. We show that SPH is an excellent method for solving this free surface problem accurately and efficiently.
@Article{JBB+22,
author = {Stefan Rhys Jeske and Jan Bender and Kirsten Bobzin and Hendrik Heinemann and Kevin Jasutyn and Marek Simon and Oleg Mokrov and Rahul Sharma and Uwe Reisgen},
journal = {Computational Particle Mechanics},
title = {Application and benchmark of {SPH} for modeling the impact in thermal spraying},
year = {2022},
month = {jan},
doi = {10.1007/s40571-022-00459-9},
publisher = {Springer Science and Business Media {LLC}},
}
Implicit Density Projection for Volume Conserving Liquids
We propose a novel implicit density projection approach for hybrid Eulerian/Lagrangian methods like FLIP and APIC to enforce volume conservation of incompressible liquids. Our approach is able to robustly recover from highly degenerate configurations and incorporates volume-conserving boundary handling. A problem of the standard divergence-free pressure solver is that it only has a differential view on density changes. Numerical volume errors, which occur due to large time steps and the limited accuracy of pressure projections, are invisible to the solver and cannot be corrected. Moreover, these errors accumulate over time and can lead to drastic volume changes, especially in long-running simulations or interactive scenarios. Therefore, we introduce a novel method that enforces constant density throughout the fluid. The density itself is tracked via the particles of the hybrid Eulerian/Lagrangian simulation algorithm. To achieve constant density, we use the continuous mass conservation law to derive a pressure Poisson equation which also takes density deviations into account. It can be discretized with standard approaches and easily implemented into existing code by extending the regular pressure solver. Our method enables us to relax the strict time step and solver accuracy requirements of a regular solver, leading to significantly higher performance. Moreover, our approach is able to push fluid particles out of solid obstacles without losing volume and generates more uniform particle distributions, which makes frequent particle resampling unnecessary. We compare the proposed method to standard FLIP and APIC and to previous volume correction approaches in several simulations and demonstrate significant improvements in terms of incompressibility, visual realism and computational performance.
» Show BibTeX
@Article{BKKW21,
author = {Tassilo Kugelstadt and Andreas Longva and Nils Thuerey and Jan Bender},
title = {Implicit Density Projection for Volume Conserving Liquids},
journal = {IEEE Transactions on Visualization and Computer Graphics},
year = {2021},
publisher = {IEEE},
volume = {27},
number = {4},
doi={ 10.1109/TVCG.2019.2947437},
}
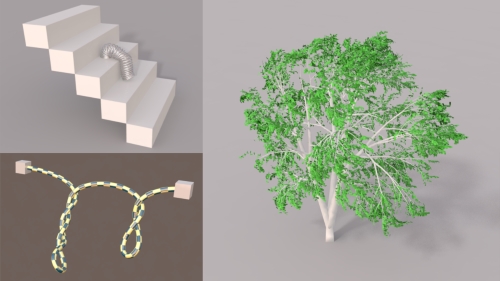
Accurately Solving Rod Dynamics with Graph Learning
Iterative solvers are widely used to accurately simulate physical systems. These solvers require initial guesses to generate a sequence of improving approximate solutions. In this contribution, we introduce a novel method to accelerate iterative solvers for rod dynamics with graph networks (GNs) by predicting the initial guesses to reduce the number of iterations. Unlike existing methods that aim to learn physical systems in an end-to-end manner, our approach guarantees long-term stability and therefore leads to more accurate solutions. Furthermore, our method improves the run time performance of traditional iterative solvers for rod dynamics. To explore our method we make use of position-based dynamics (PBD) as a common solver for physical systems and evaluate it by simulating the dynamics of elastic rods. Our approach is able to generalize across different initial conditions, discretizations, and realistic material properties. We demonstrate that it also performs well when taking discontinuous effects into account such as collisions between individual rods. Finally, to illustrate the scalability of our approach, we simulate complex 3D tree models composed of over a thousand individual branch segments swaying in wind fields.
» Show BibTeX
@inproceedings{Shao:2021:GraphLearning,
title={Accurately Solving Rod Dynamics with Graph Learning},
author={Han Shao and Tassilo Kugelstadt and Torsten H\"{a}drich and Wojciech Pa\l{}ubicki and Jan Bender and S\"{o}ren Pirk and Dominik L. Michels},
year={2021},
booktitle={Advances in Neural Information Processing Systems (NeurIPS)},
URL={http://computationalsciences.org/publications/shao-2021-physical-systems-graph-learning.html}
}
Fast Corotated Elastic SPH Solids with Implicit Zero-Energy Mode Control
We develop a new operator splitting formulation for the simulation of corotated linearly elastic solids with Smoothed Particle Hydrodynamics (SPH). Based on the technique of Kugelstadt et al. [KKB2018] originally developed for the Finite Element Method (FEM), we split the elastic energy into two separate terms corresponding to stretching and volume conservation, and based on this principle, we design a splitting scheme compatible with SPH. The operator splitting scheme enables us to treat the two terms separately, and because the stretching forces lead to a stiffness matrix that is constant in time, we are able to prefactor the system matrix for the implicit integration step. Solid-solid contact and fluid-solid interaction is achieved through a unified pressure solve. We demonstrate more than an order of magnitude improvement in computation time compared to a state-of-the-art SPH simulator for elastic solids.
We further improve the stability and reliability of the simulation through several additional contributions. We introduce a new implicit penalty mechanism that suppresses zero-energy modes inherent in the SPH formulation for elastic solids, and present a new, physics-inspired sampling algorithm for generating high-quality particle distributions for the rest shape of an elastic solid. We finally also devise an efficient method for interpolating vertex positions of a high-resolution surface mesh based on the SPH particle positions for use in high-fidelity visualization.
» Show BibTeX
@article{KBF+21,
author = {Kugelstadt, Tassilo and Bender, Jan and Fern{\'{a}}ndez-Fern{\'{a}}ndez, Jos{\'{e}} Antonio and Jeske, Stefan Rhys and L{\"{o}}schner, Fabian and Longva, Andreas},
title = {Fast Corotated Elastic SPH Solids with Implicit Zero-Energy Mode Control},
year = {2021},
issue_date = {September 2021},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
volume = {4},
number = {3},
url = {https://doi.org/10.1145/3480142},
doi = {10.1145/3480142},
journal = {Proc. ACM Comput. Graph. Interact. Tech.},
month = sep,
articleno = {33},
numpages = {21},
keywords = {Smoothed Particle Hydrodynamics, fluid simulation, deformable solids, solid-fluid coupling}
}
Higher-Order Finite Elements for Embedded Simulation
As demands for high-fidelity physics-based animations increase, the need for accurate methods for simulating deformable solids grows. While higher-order finite elements are commonplace in engineering due to their superior approximation properties for many problems, they have gained little traction in the computer graphics community. This may partially be explained by the need for finite element meshes to approximate the highly complex geometry of models used in graphics applications. Due to the additional per-element computational expense of higher-order elements, larger elements are needed, and the error incurred due to the geometry mismatch eradicates the benefits of higher-order discretizations. One solution to this problem is the embedding of the geometry into a coarser finite element mesh. However, to date there is no adequate, practical computational framework that permits the accurate embedding into higher-order elements.
We develop a novel, robust quadrature generation method that generates theoretically guaranteed high-quality sub-cell integration rules of arbitrary polynomial accuracy. The number of quadrature points generated is bounded only by the desired degree of the polynomial, independent of the embedded geometry. Additionally, we build on recent work in the Finite Cell Method (FCM) community so as to tackle the severe ill-conditioning caused by partially filled elements by adapting an Additive-Schwarz-based preconditioner so that it is suitable for use with state-of-the-art non-linear material models from the graphics literature. Together these two contributions constitute a general-purpose framework for embedded simulation with higher-order finite elements.
We finally demonstrate the benefits of our framework in several scenarios, in which second-order hexahedra and tetrahedra clearly outperform their first-order counterparts.
» Show BibTeX
@ARTICLE{ LLKFB20,
author= {Andreas Longva and Fabian L{\"{o}}schner and Tassilo Kugelstadt and Jos{\'{e}} Antonio Fern{\'{a}}ndez-Fern{\'{a}}ndez and Jan Bender },
title= {{Higher-Order Finite Elements for Embedded Simulation}},
year= {2020},
journal= {ACM Transactions on Graphics (SIGGRAPH Asia)},
publisher= {ACM},
volume = {39},
number = {6},
pages= {14}
}
Implicit Frictional Boundary Handling for SPH
In this paper, we present a novel method for the robust handling of static and dynamic rigid boundaries in Smoothed Particle Hydrodynamics (SPH) simulations. We build upon the ideas of the density maps approach which has been introduced recently by Koschier and Bender. They precompute the density contributions of solid boundaries and store them on a spatial grid which can be efficiently queried during runtime. This alleviates the problems of commonly used boundary particles, like bumpy surfaces and inaccurate pressure forces near boundaries. Our method is based on a similar concept but we precompute the volume contribution of the boundary geometry. This maintains all benefits of density maps but offers a variety of advantages which are demonstrated in several experiments. Firstly, in contrast to the density maps method we can compute derivatives in the standard SPH manner by differentiating the kernel function. This results in smooth pressure forces, even for lower map resolutions, such that precomputation times and memory requirements are reduced by more than two orders of magnitude compared to density maps. Furthermore, this directly fits into the SPH concept so that volume maps can be seamlessly combined with existing SPH methods. Finally, the kernel function is not baked into the map such that the same volume map can be used with different kernels. This is especially useful when we want to incorporate common surface tension or viscosity methods that use different kernels than the fluid simulation.
» Show BibTeX
@Article{BKWK2020,
author = {Jan Bender and Tassilo Kugelstadt and Marcel Weiler and Dan Koschier },
title = {Implicit Frictional Boundary Handling for SPH},
journal = {IEEE Transactions on Visualization and Computer Graphics},
year = {2020},
publisher = {IEEE},
volume={26},
number={10},
pages={2982-2993},
doi={10.1109/TVCG.2020.3004245},
}
Higher-Order Time Integration for Deformable Solids
Visually appealing and vivid simulations of deformable solids represent an important aspect of physically based computer animation. For the temporal discretization, it is customary in computer animation to use first-order accurate integration methods, such as Backward Euler, due to their simplicity and robustness. Although there is notable research on second-order methods, their use is not widespread. Many of these well-known methods have significant drawbacks such as severe numerical damping or scene-dependent time step restrictions to ensure stability. In this paper, we discuss the most relevant requirements on such methods in computer animation and motivate the interest beyond first-order accuracy. Keeping these requirements in mind, we investigate several promising methods from the families of diagonally implicit Runge-Kutta (DIRK) and Rosenbrock methods which currently do not appear to have considerable popularity in this field. We show that the usage of such methods improves the visual quality of physical animations. In addition, we demonstrate that they allow distinctly more control over damping at lower computational cost than classical methods. As part of our theoretical contribution, we review aspects of simulations that are often considered more intricate with higher-order methods, such as contact handling. To this end, we derive an implicit linearized contact model based on a predictor-corrector approach that leads to consistent behavior with higher-order integrators as predictors. Our contact model is well suited for the simulation of stiff, nonlinear materials with the integration methods presented in this paper and more common methods such as Backward Euler alike.
» Show BibTeX
@article{LLJKB20,
author = {Fabian L{\"{o}}schner and Andreas Longva and Stefan Jeske and Tassilo Kugelstadt and Jan Bender},
title = {Higher-Order Time Integration for Deformable Solids},
year = {2020},
journal = {Computer Graphics Forum},
volume = {39},
number = {8}
}
Interlinked SPH Pressure Solvers for Strong Fluid-Rigid Coupling
We present a strong fluid-rigid coupling for SPH fluids and rigid bodies with particle-sampled surfaces. The approach interlinks the iterative pressure update at fluid particles with a second SPH solver that computes artificial pressure at rigid body particles. The introduced SPH rigid body solver models rigid-rigid contacts as artificial density deviations at rigid body particles. The corresponding pressure is iteratively computed by solving a global formulation which is particularly useful for large numbers of rigid-rigid contacts. Compared to previous SPH coupling methods, the proposed concept stabilizes the fluid-rigid interface handling. It significantly reduces the computation times of SPH fluid simulations by enabling larger time steps. Performance gain factors of up to 58 compared to previous methods are presented. We illustrate the flexibility of the presented fluid-rigid coupling by integrating it into DFSPH, IISPH and a recent SPH solver for highly viscous fluids. We further show its applicability to a recent SPH solver for elastic objects. Large scenarios with up to 90M particles of various interacting materials and complex contact geometries with up to 90k rigid-rigid contacts are shown. We demonstrate the competitiveness of our proposed rigid body solver by comparing it to Bullet.
» Show BibTeX
@article{ Gissler2019,
author= {Christoph Gissler and Andreas Peer and Stefan Band and Jan Bender and Matthias Teschner},
title= {Interlinked SPH Pressure Solvers for Strong Fluid-Rigid Coupling},
year= {2018},
journal= {ACM Trans. Graph.},
publisher= {ACM},
issue_date = {January 2019},
volume = {38},
number = {1},
month = jan,
year = {2019},
issn = {0730-0301},
pages = {5:1--5:13},
articleno = {5},
numpages = {13},
url = {http://doi.acm.org/10.1145/3284980},
doi = {10.1145/3284980},
address = {New York, NY, USA},
}
Turbulent Micropolar SPH Fluids with Foam
In this paper we introduce a novel micropolar material model for the simulation of turbulent inviscid fluids. The governing equations are solved by using the concept of Smoothed Particle Hydrodynamics (SPH). As already investigated in previous works, SPH fluid simulations suffer from numerical diffusion which leads to a lower vorticity, a loss in turbulent details and finally in less realistic results. To solve this problem we propose a micropolar fluid model. The micropolar fluid model is a generalization of the classical Navier-Stokes equations, which are typically used in computer graphics to simulate fluids. In contrast to the classical Navier-Stokes model, micropolar fluids have a microstructure and therefore consider the rotational motion of fluid particles. In addition to the linear velocity field these fluids also have a field of microrotation which represents existing vortices and provides a source for new ones. However, classical micropolar materials are viscous and the translational and the rotational motion are coupled in a dissipative way. Since our goal is to simulate turbulent fluids, we introduce a novel modified micropolar material for inviscid fluids with a non-dissipative coupling. Our model can generate realistic turbulences, is linear and angular momentum conserving, can be easily integrated in existing SPH simulation methods and its computational overhead is negligible. Another important visual feature of turbulent liquids is foam. Therefore, we present a post-processing method which considers microrotation in the foam particle generation. It works completely automatic and requires only one user-defined parameter to control the amount of foam.
» Show BibTeX
@Article{BKKW19,
author = {Bender, Jan and Koschier, Dan and Kugelstadt, Tassilo and Weiler, Marcel},
title = {Turbulent Micropolar SPH Fluids with Foam},
journal = {IEEE Transactions on Visualization and Computer Graphics},
year = {2019},
publisher = {IEEE},
volume={25},
number={6},
pages={2284-2295},
doi={10.1109/TVCG.2018.2832080},
ISSN={1077-2626},
month={June},
}
Smoothed Particle Hydrodynamics for Physically-Based Simulation of Fluids and Solids

Graphics research on Smoothed Particle Hydrodynamics (SPH) has produced fantastic visual results that are unique across the board of research communities concerned with SPH simulations. Generally, the SPH formalism serves as a spatial discretization technique, commonly used for the numerical simulation of continuum mechanical problems such as the simulation of fluids, highly viscous materials, and deformable solids. Recent advances in the field have made it possible to efficiently simulate massive scenes with highly complex boundary geometries on a single PC. Moreover, novel techniques allow to robustly handle interactions among various materials. As of today, graphics-inspired pressure solvers, neighborhood search algorithms, boundary formulations, and other contributions often serve as core components in commercial software for animation purposes as well as in computer-aided engineering software.
This tutorial covers various aspects of SPH simulations. Governing equations for mechanical phenomena and their SPH discretizations are discussed. Concepts and implementations of core components such as neighborhood search algorithms, pressure solvers, and boundary handling techniques are presented. Implementation hints for the realization of SPH solvers for fluids, elastic solids, and rigid bodies are given. The tutorial combines the introduction of theoretical concepts with the presentation of actual implementations.
@inproceedings {KBST19,
title = "Smoothed Particle Hydrodynamics for Physically-Based Simulation of Fluids and Solids",
author = "Dan Koschier and Jan Bender and Barbara Solenthaler and Matthias Teschner",
year = "2019",
booktitle = "EUROGRAPHICS 2019 Tutorials",
publisher = "Eurographics Association"
}
Volume Maps: An Implicit Boundary Representation for SPH
In this paper, we present a novel method for the robust handling of static and dynamic rigid boundaries in Smoothed Particle Hydrodynamics (SPH) simulations. We build upon the ideas of the density maps approach which has been introduced recently by Koschier and Bender. They precompute the density contributions of solid boundaries and store them on a spatial grid which can be efficiently queried during runtime. This alleviates the problems of commonly used boundary particles, like bumpy surfaces and inaccurate pressure forces near boundaries. Our method is based on a similar concept but we precompute the volume contribution of the boundary geometry and store it on a grid. This maintains all benefits of density maps but offers a variety of advantages which are demonstrated in several experiments. Firstly, in contrast to the density maps method we can compute derivatives in the standard SPH manner by differentiating the kernel function. This results in smooth pressure forces, even for lower map resolutions, such that precomputation times and memory requirements are reduced by more than two orders of magnitude compared to density maps. Furthermore, this directly fits into the SPH concept so that volume maps can be seamlessly combined with existing SPH methods. Finally, the kernel function is not baked into the map such that the same volume map can be used with different kernels. This is especially useful when we want to incorporate common surface tension or viscosity methods that use different kernels than the fluid simulation.
» Show BibTeX
@inproceedings{Bender2019,
author = {Jan Bender and Tassilo Kugelstadt and Marcel Weiler and Dan Koschier},
title = {Volume Maps: An Implicit Boundary Representation for SPH},
booktitle = {Proceedings of ACM SIGGRAPH Conference on Motion, Interaction and Games},
series = {MIG '19},
year = {2019},
publisher = {ACM}
}
An Optimized Source Term Formulation for Incompressible SPH
Incompressible SPH (ISPH) is a promising concept for the pressure computation in SPH. It works with large timesteps and the underlying pressure Poisson equation (PPE) can be solved very efficiently. Still, various aspects of current ISPH formulations can be optimized.
This paper discusses issues of the two standard source terms that are typically employed in PPEs, i.e. density invariance (DI) and velocity divergence (VD). We show that the DI source term suffers from significant artificial viscosity, while the VD source term suffers from particle disorder and volume loss.
As a conclusion of these findings, we propose a novel source term handling. A first PPE is solved with the VD source term to compute a divergence-free velocity field with minimized artificial viscosity. To address the resulting volume error and particle disorder, a second PPE is solved to improve the sampling quality. The result of the second PPE is used for a particle shift (PS) only. The divergence-free velocity field - computed from the first PPE - is not changed, but only resampled at the updated particle positions. Thus, the proposed source term handling incorporates velocity divergence and particle shift (VD+PS).
» Show BibTeX
@Article{Cornelis2019,
author = {Cornelis, Jens and Bender, Jan and Gissler, Christoph and Ihmsen, Markus and Teschner, Matthias},
title = {An optimized source term formulation for incompressible SPH},
journal = {The Visual Computer},
year = {2019},
month = {Apr},
volume={35},
number={4},
pages={579--590},
issn = {1432-2315},
day = {20},
doi = {10.1007/s00371-018-1488-8},
url = {https://doi.org/10.1007/s00371-018-1488-8},
}
Fast Corotated FEM using Operator Splitting
In this paper we present a novel operator splitting approach for corotated FEM simulations. The deformation energy of the corotated linear material model consists of two additive terms. The first term models stretching in the individual spatial directions and the second term describes resistance to volume changes. By formulating the backward Euler time integration scheme as an optimization problem, we show that the first term is invariant to rotations. This allows us to use an operator splitting approach and to solve both terms individually with different numerical methods. The stretching part is solved accurately with an optimization integrator, which can be done very efficiently because the system matrix is constant over time such that its Cholesky factorization can be precomputed. The volume term is solved approximately by using the compliant constraints method and Gauss-Seidel iterations. Further, we introduce the analytic polar decomposition which allows us to speed up the extraction of the rotational part of the deformation gradient and to recover inverted elements. Finally, this results in an extremely fast and robust simulation method with high visual quality that outperforms standard corotated FEMs by more than two orders of magnitude and even the fast but inaccurate PBD and shape matching methods by more than one order of magnitude without having their typical drawbacks. This enables a very efficient simulation of complex scenes containing more than a million elements.
» Show BibTeX
@article{KKB2018,
author = {Tassilo Kugelstadt and Dan Koschier and Jan Bender},
title = {Fast Corotated FEM using Operator Splitting},
year = {2018},
journal = {Computer Graphics Forum (SCA)},
volume = {37},
number = {8}
}
A Physically Consistent Implicit Viscosity Solver for SPH Fluids
In this paper, we present a novel physically consistent implicit solver for the simulation of highly viscous fluids using the Smoothed Particle Hydrodynamics (SPH) formalism. Our method is the result of a theoretical and practical in-depth analysis of the most recent implicit SPH solvers for viscous materials. Based on our findings, we developed a list of requirements that are vital to produce a realistic motion of a viscous fluid. These essential requirements include momentum conservation, a physically meaningful behavior under temporal and spatial refinement, the absence of ghost forces induced by spurious viscosities and the ability to reproduce complex physical effects that can be observed in nature. On the basis of several theoretical analyses, quantitative academic comparisons and complex visual experiments we show that none of the recent approaches is able to satisfy all requirements. In contrast, our proposed method meets all demands and therefore produces realistic animations in highly complex scenarios. We demonstrate that our solver outperforms former approaches in terms of physical accuracy and memory consumption while it is comparable in terms of computational performance. In addition to the implicit viscosity solver, we present a method to simulate melting objects. Therefore, we generalize the viscosity model to a spatially varying viscosity field and provide an SPH discretization of the heat equation.
» Show BibTeX
@article{WKBB2018,
author = {Marcel Weiler and Dan Koschier and Magnus Brand and Jan Bender},
title = {A Physically Consistent Implicit Viscosity Solver for SPH Fluids},
year = {2018},
journal = {Computer Graphics Forum (Eurographics)},
volume = {37},
number = {2}
}
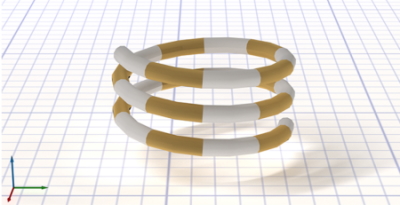
Direct Position-Based Solver for Stiff Rods
In this paper, we present a novel direct solver for the efficient simulation of stiff, inextensible elastic rods within the Position-Based Dynamics (PBD) framework. It is based on the XPBD algorithm, which extends PBD to simulate elastic objects with physically meaningful material parameters. XPBD approximates an implicit Euler integration and solves the system of non-linear equations using a non-linear Gauss-Seidel solver. However, this solver requires many iterations to converge for complex models and if convergence is not reached, the material becomes too soft. In contrast we use Newton iterations in combination with our direct solver to solve the non-linear equations which significantly improves convergence by solving all constraints of an acyclic structure (tree), simultaneously. Our solver only requires a few Newton iterations to achieve high stiffness and inextensibility. We model inextensible rods and trees using rigid segments connected by constraints. Bending and twisting constraints are derived from the well-established Cosserat model. The high performance of our solver is demonstrated in highly realistic simulations of rods consisting of multiple ten-thousand segments. In summary, our method allows the efficient simulation of stiff rods in the Position-Based Dynamics framework with a speedup of two orders of magnitude compared to the original XPBD approach.
» Show BibTeX
@article{DKWB2018,
author = {Crispin Deul and Tassilo Kugelstadt and Marcel Weiler and Jan Bender},
title = {Direct Position-Based Solver for Stiff Rods},
year = {2018},
journal = {Computer Graphics Forum},
volume = {37},
number = {6},
pages = {313-324},
keywords = {physically based animation, animation, Computing methodologies → Physical simulation},
doi = {10.1111/cgf.13326},
url = {https://onlinelibrary.wiley.com/doi/abs/10.1111/cgf.13326},
eprint = {https://onlinelibrary.wiley.com/doi/pdf/10.1111/cgf.13326},
}
Robust eXtended Finite Elements for Complex Cutting of Deformables
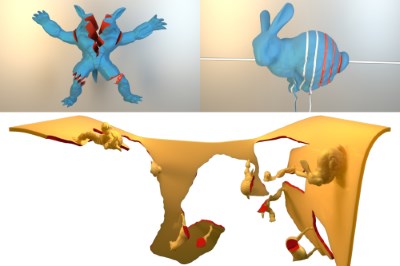
In this paper we present a robust remeshing-free cutting algorithm on the basis of the eXtended Finite Element Method (XFEM) and fully implicit time integration. One of the most crucial points of the XFEM is that integrals over discontinuous polynomials have to be computed on subdomains of the polyhedral elements. Most existing approaches construct a cut-aligned auxiliary mesh for integration. In contrast, we propose a cutting algorithm that includes the construction of specialized quadrature rules for each dissected element without the requirement to explicitly represent the arising subdomains. Moreover, we solve the problem of ill-conditioned or even numerically singular solver matrices during time integration using a novel algorithm that constrains non-contributing degrees of freedom (DOFs) and introduce a preconditioner that efficiently reuses the constructed quadrature weights. Our method is particularly suitable for fine structural cutting as it decouples the added number of DOFs from the cut's geometry and correctly preserves geometry and physical properties by accurate integration. Due to the implicit time integration these fine features can still be simulated robustly using large time steps. As opposed to this, the vast majority of existing approaches either use remeshing or element duplication. Remeshing based methods are able to correctly preserve physical quantities but strongly couple cut geometry and mesh resolution leading to an unnecessary large number of additional DOFs. Element duplication based approaches keep the number of additional DOFs small but fail at correct conservation of mass and stiffness properties. We verify consistency and robustness of our approach on simple and reproducible academic examples while stability and applicability are demonstrated in large scenarios with complex and fine structural cutting.
» Show BibTeX
@ARTICLE{ Koschier2017,
author= {Dan Koschier and Jan Bender and Nils Thuerey},
title= {{Robust eXtended Finite Elements for Complex Cutting of Deformables}},
year= {2017},
journal= {ACM Transactions on Graphics (SIGGRAPH)},
publisher= {ACM},
volume = {36},
number = {4},
pages= {12}
}
An hp-Adaptive Discretization Algorithm for Signed Distance Field Generation
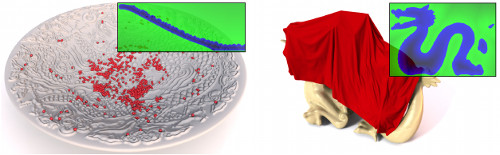
In this paper we present an hp-adaptive algorithm to generate discrete higher-order polynomial Signed Distance Fields (SDFs) on axis-aligned hexahedral grids from manifold polygonal input meshes. Using an orthonormal polynomial basis, we efficiently fit the polynomials to the underlying signed distance function on each cell. The proposed error-driven construction algorithm is globally adaptive and iteratively refines the SDFs using either spatial subdivision (h-refinement) following an octree scheme or by cell-wise adaption of the polynomial approximation's degree (p-refinement). We further introduce a novel decision criterion based on an error-estimator in order to decide whether to apply p- or h-refinement. We demonstrate that our method is able to construct more accurate SDFs at significantly lower memory consumption compared to previous approaches. While the cell-wise polynomial approximation will result in highly accurate SDFs, it can not be guaranteed that the piecewise approximation is continuous over cell interfaces. Therefore, we propose an optimization-based post-processing step in order to weakly enforce continuity. Finally, we apply our generated SDFs as collision detector to the physically-based simulation of geometrically highly complex solid objects in order to demonstrate the practical relevance and applicability of our method.
» Show BibTeX
@Article{KDBB17,
author = {Koschier, Dan and Deul, Crispin and Brand, Magnus and Bender, Jan},
title = {An hp-Adaptive Discretization Algorithm for Signed Distance Field Generation},
journal = {IEEE Transactions on Visualization and Computer Graphics},
year = {2017},
volume = {23},
number = {10},
pages = {1--14},
issn = {1077-2626},
doi = {10.1109/TVCG.2017.2730202}
}
Divergence-Free SPH for Incompressible and Viscous Fluids

In this paper we present a novel Smoothed Particle Hydrodynamics (SPH) method for the efficient and stable simulation of incompressible fluids. The most efficient SPH-based approaches enforce incompressibility either on position or velocity level. However, the continuity equation for incompressible flow demands to maintain a constant density and a divergence-free velocity field. We propose a combination of two novel implicit pressure solvers enforcing both a low volume compression as well as a divergence-free velocity field. While a compression-free fluid is essential for realistic physical behavior, a divergence-free velocity field drastically reduces the number of required solver iterations and increases the stability of the simulation significantly. Thanks to the improved stability, our method can handle larger time steps than previous approaches. This results in a substantial performance gain since the computationally expensive neighborhood search has to be performed less frequently. Moreover, we introduce a third optional implicit solver to simulate highly viscous fluids which seamlessly integrates into our solver framework. Our implicit viscosity solver produces realistic results while introducing almost no numerical damping. We demonstrate the efficiency, robustness and scalability of our method in a variety of complex simulations including scenarios with millions of turbulent particles or highly viscous materials.
» Show BibTeX
@article{Bender2017,
author = {Jan Bender and Dan Koschier},
title = {Divergence-Free SPH for Incompressible and Viscous Fluids},
year = {2017},
journal = {IEEE Transactions on Visualization and Computer Graphics},
publisher = {IEEE},
year={2017},
volume={23},
number={3},
pages={1193-1206},
keywords={Smoothed Particle Hydrodynamics;divergence-free fluids;fluid simulation;implicit integration;incompressibility;viscous fluids},
doi={10.1109/TVCG.2016.2578335},
ISSN={1077-2626}
}
A Micropolar Material Model for Turbulent SPH Fluids

In this paper we introduce a novel micropolar material model for the simulation of turbulent inviscid fluids. The governing equations are solved by using the concept of Smoothed Particle Hydrodynamics (SPH). As already investigated in previous works, SPH fluid simulations suffer from numerical diffusion which leads to a lower vorticity, a loss in turbulent details and finally in less realistic results. To solve this problem we propose a micropolar fluid model. The micropolar fluid model is a generalization of the classical Navier-Stokes equations, which are typically used in computer graphics to simulate fluids. In contrast to the classical Navier-Stokes model, micropolar fluids have a microstructure and therefore consider the rotational motion of fluid particles. In addition to the linear velocity field these fluids also have a field of microrotation which represents existing vortices and provides a source for new ones. However, classical micropolar materials are viscous and the translational and the rotational motion are coupled in a dissipative way. Since our goal is to simulate turbulent fluids, we introduce a novel modified micropolar material for inviscid fluids with a non-dissipative coupling. Our model can generate realistic turbulences, is linear and angular momentum conserving, can be easily integrated in existing SPH simulation methods and its computational overhead is negligible.
» Show BibTeX
@INPROCEEDINGS{Bender2017,
author = {Jan Bender and Dan Koschier and Tassilo Kugelstadt and Marcel Weiler},
title = {A Micropolar Material Model for Turbulent SPH Fluids},
booktitle = {Proceedings of the 2017 ACM SIGGRAPH/Eurographics Symposium on Computer
Animation},
year = {2017},
publisher = {ACM}
}
Density Maps for Improved SPH Boundary Handling
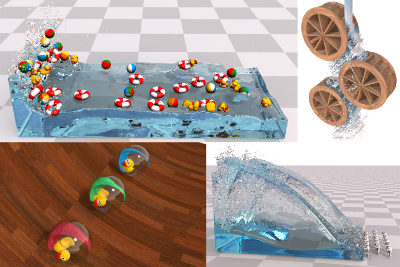
In this paper, we present the novel concept of density maps for robust handling of static and rigid dynamic boundaries in fluid simulations based on Smoothed Particle Hydrodynamics (SPH). In contrast to the vast majority of existing approaches, we use an implicit discretization for a continuous extension of the density field throughout solid boundaries. Using the novel representation we enhance accuracy and efficiency of density and density gradient evaluations in boundary regions by computationally efficient lookups into our density maps. The map is generated in a preprocessing step and discretizes the density contribution in the boundary's near-field. In consequence of the high regularity of the continuous boundary density field, we use cubic Lagrange polynomials on a narrow-band structure of a regular grid for discretization. This strategy not only removes the necessity to sample boundary surfaces with particles but also decouples the particle size from the number of sample points required to represent the boundary. Moreover, it solves the ever-present problem of particle deficiencies near the boundary. In several comparisons we show that the representation is more accurate than particle samplings, especially for smooth curved boundaries. We further demonstrate that our approach robustly handles scenarios with highly complex boundaries and even outperforms one of the most recent sampling based techniques.
» Show BibTeX
@InProceedings{KB17,
author = {Dan Koschier and Jan Bender},
title = {Density Maps for Improved SPH Boundary Handling},
booktitle = {Proceedings of the 2017 ACM SIGGRAPH/Eurographics Symposium on Computer Animation},
year = {2017},
series = {SCA '17},
pages = {1--10},
publisher = {ACM}
}
A Survey on Position Based Dynamics, 2017

The physically-based simulation of mechanical effects has been an important research topic in computer graphics for more than two decades. Classical methods in this field discretize Newton's second law and determine different forces to simulate various effects like stretching, shearing, and bending of deformable bodies or pressure and viscosity of fluids, to mention just a few. Given these forces, velocities and finally positions are determined by a numerical integration of the resulting accelerations. In the last years position-based simulation methods have become popular in the graphics community. In contrast to classical simulation approaches these methods compute the position changes in each simulation step directly, based on the solution of a quasi-static problem. Therefore, position-based approaches are fast, stable and controllable which make them well-suited for use in interactive environments. However, these methods are generally not as accurate as force-based methods but provide visual plausibility. Hence, the main application areas of position-based simulation are virtual reality, computer games and special effects in movies and commercials. In this tutorial we first introduce the basic concept of position-based dynamics. Then we present different solvers and compare them with the variational formulation of the implicit Euler method in connection with compliant constraints. We discuss approaches to improve the convergence of these solvers. Moreover, we show how position-based methods are applied to simulate elastic rods, cloth, volumetric deformable bodies, rigid body systems and fluids. We also demonstrate how complex effects like anisotropy or plasticity can be simulated and introduce approaches to improve the performance. Finally, we give an outlook and discuss open problems.
@inproceedings {BMM2017,
title = "A Survey on Position Based Dynamics, 2017",
author = "Jan Bender and Matthias M{\"u}ller and Miles Macklin",
year = "2017",
booktitle = "EUROGRAPHICS 2017 Tutorials",
publisher = "Eurographics Association"
}
Hierarchical hp-Adaptive Signed Distance Fields
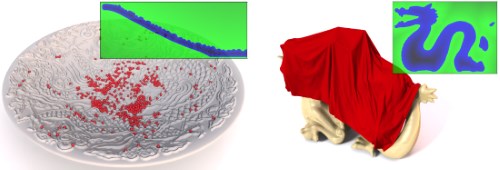
In this paper we propose a novel method to construct hierarchical $hp$-adaptive Signed Distance Fields (SDFs). We discretize the signed distance function of an input mesh using piecewise polynomials on an axis-aligned hexahedral grid. Besides spatial refinement based on octree subdivision to refine the cell size (h), we hierarchically increase each cell's polynomial degree (p) in order to construct a very accurate but memory-efficient representation. Presenting a novel criterion to decide whether to apply h- or p-refinement, we demonstrate that our method is able to construct more accurate SDFs at significantly lower memory consumption than previous approaches. Finally, we demonstrate the usage of our representation as collision detector for geometrically highly complex solid objects in the application area of physically-based simulation.
» Show BibTeX
@INPROCEEDINGS{Koschier2016,
author = {Dan Koschier and Crispin Deul and Jan Bender},
title = {Hierarchical hp-Adaptive Signed Distance Fields},
booktitle = {Proceedings of the 2016 ACM SIGGRAPH/Eurographics Symposium on Computer
Animation},
year = {2016},
publisher = {Eurographics Association},
location = {Zurich, Switzerland}
}
Deferred Warping

We introduce deferred warping, a novel approach for real-time deformation of 3D objects attached to an animated or manipulated surface. Our target application is virtual prototyping of garments where 2D pattern modeling is combined with 3D garment simulation which allows an immediate validation of the design. The technique works in two steps: First, the surface deformation of the target object is determined and the resulting transformation field is stored as a matrix texture. Then the matrix texture is used as look-up table to transform a given geometry onto a deformed surface. Splitting the process in two steps yields a large flexibility since different attachment types can be realized by simply defining specific mapping functions. Our technique can directly handle complex topology changes within the surface. We demonstrate a fast implementation in the vertex shading stage allowing the use of highly decorated surfaces with millions of triangles in real-time.
» Show BibTeX
@ARTICLE{Knuth2016,
author={Martin Knuth and Jan Bender and Michael Goesele and Arjan Kuijper},
journal={IEEE Computer Graphics and Applications},
title={Deferred Warping},
year={2016},
doi={10.1109/MCG.2016.41},
ISSN={0272-1716}
}
Projective Fluids

We present a new method for particle based fluid simulation, using a combination of Projective Dynamics and Smoothed Particle Hydrodynamics (SPH). The Projective Dynamics framework allows the fast simulation of a wide range of constraints. It offers great stability through its implicit time integration scheme and is parallelizable in large parts, so that it can make use of modern multi core CPUs. Yet existing work only uses Projective Dynamics to simulate various kinds of soft bodies and cloth. We are the first ones to incorporate fluid simulation into the Projective Dynamics framework. Our proposed fluid constraints are derived from SPH and seamlessly integrate into the existing method. Furthermore, we adapt the solver to handle the constantly changing constraints that appear in fluid simulation. We employ a highly parallel matrix-free conjugate gradient solver, and thus do not require expensive matrix factorizations.
» Show BibTeX
@inproceedings{Weiler2016,
author = {Marcel Weiler and Dan Koschier and Jan Bender},
title = {Projective Fluids},
booktitle = {Proceedings of ACM SIGGRAPH Conference on Motion in Games},
series = {MIG '16},
year = {2016},
publisher = {ACM}
}
A Robust Method to Extract the Rotational Part of Deformations
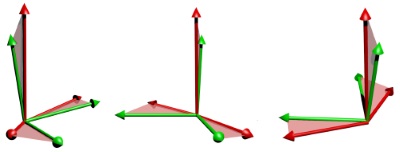
We present a novel algorithm to extract the rotational part of an arbitrary 3x3 matrix. This problem lies at the core of two popular simulation methods in computer graphics, the co-rotational Finite Element Method and Shape Matching techniques. In contrast to the traditional method based on polar decomposition, degenerate configurations and inversions are handled robustly and do not have to be treated in a special way. In addition, our method can be implemented with only a few lines of code without branches which makes it particularly well suited for GPU-based applications. We demonstrate the robustness, coherence and efficiency of our method by comparing it to stabilized polar decomposition in several simulation scenarios.
» Show BibTeX
@inproceedings{Mueller2016,
author = {Matthias M\"{u}ller and Jan Bender and Nuttapong Chentanez and Miles Macklin},
title = {A Robust Method to Extract the Rotational Part of Deformations},
booktitle = {Proceedings of ACM SIGGRAPH Conference on Motion in Games},
series = {MIG '16},
year = {2016},
publisher = {ACM}
}
Real-Time Isosurface Extraction with View-Dependent Level of Detail and Applications
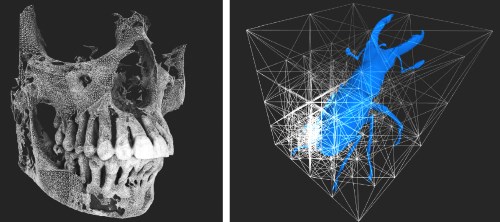
Volumetric scalar datasets are common in many scientific, engineering, and medical applications where they originate from measurements or simulations. Furthermore, they can represent geometric scene content, e.g. as distance or density fields. Often isosurfaces are extracted, either for indirect volume visualization in the former category, or to simply obtain a polygonal representation in case of the latter. However, even moderately sized volume datasets can result in complex isosurfaces which are challenging to recompute in real-time, e.g. when the user modifies the isovalue or when the data itself is dynamic. In this paper, we present a GPU-friendly algorithm for the extraction of isosurfaces, which provides adaptive level of detail rendering with view-dependent tessellation. It is based on a longest edge bisection scheme where the resulting tetrahedral cells are subdivided into four hexahedra, which then form the domain for the subsequent isosurface extraction step. Our algorithm generates meshes with good triangle quality even for highly nonlinear scalar data. In contrast to previous methods, it does not require any stitching between regions of different levels of detail. As all computation is performed at run-time and no preprocessing is required, the algorithm naturally supports dynamic data and allows us to change isovalues at any time.
@article{SBD2015,
title = {Real-Time Isosurface Extraction with View-Dependent Level of Detail and Applications},
author = {Manuel Scholz and Jan Bender and Carsten Dachsbacher},
year = {2015},
volume = {34},
pages = {103--115},
number = {1},
doi = {10.1111/cgf.12462},
issn = {1467-8659},
journal = {Computer Graphics Forum},
url = {http://dx.doi.org/10.1111/cgf.12462}
}
Position-Based Simulation Methods in Computer Graphics

The physically-based simulation of mechanical effects has been an important research topic in computer graphics for more than two decades. Classical methods in this field discretize Newton's second law and determine different forces to simulate various effects like stretching, shearing, and bending of deformable bodies or pressure and viscosity of fluids, to mention just a few. Given these forces, velocities and finally positions are determined by a numerical integration of the resulting accelerations.
In the last years position-based simulation methods have become popular in the graphics community. In contrast to classical simulation approaches these methods compute the position changes in each simulation step directly, based on the solution of a quasi-static problem. Therefore, position-based approaches are fast, stable and controllable which make them well-suited for use in interactive environments. However, these methods are generally not as accurate as force-based methods but still provide visual plausibility. Hence, the main application areas of position-based simulation are virtual reality, computer games and special effects in movies and commercials.
In this tutorial we first introduce the basic concept of position-based dynamics. Then we present different solvers and compare them with the classical implicit Euler method. We discuss approaches to improve the convergence of these solvers. Moreover, we show how position-based methods are applied to simulate hair, cloth, volumetric deformable bodies, rigid body systems and fluids. We also demonstrate how complex effects like anisotropy or plasticity can be simulated and introduce approaches to improve the performance. Finally, we give an outlook and discuss open problems.
@inproceedings{BMM2015,
title = "Position-Based Simulation Methods in Computer Graphics",
author = "Jan Bender and Matthias M{\"u}ller and Miles Macklin",
year = "2015",
booktitle = "EUROGRAPHICS 2015 Tutorials",
publisher = "Eurographics Association",
location = "Zurich, Switzerland"
}
Divergence-Free Smoothed Particle Hydrodynamics
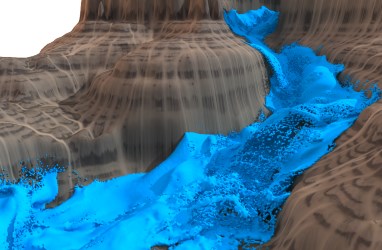
In this paper we introduce an efficient and stable implicit SPH method for the physically-based simulation of incompressible fluids. In the area of computer graphics the most efficient SPH approaches focus solely on the correction of the density error to prevent volume compression. However, the continuity equation for incompressible flow also demands a divergence-free velocity field which is neglected by most methods. Although a few methods consider velocity divergence, they are either slow or have a perceivable density fluctuation.
Our novel method uses an efficient combination of two pressure solvers which enforce low volume compression (below 0.01%) and a divergence-free velocity field. This can be seen as enforcing incompressibility both on position level and velocity level. The first part is essential for realistic physical behavior while the divergence-free state increases the stability significantly and reduces the number of solver iterations. Moreover, it allows larger time steps which yields a considerable performance gain since particle neighborhoods have to be updated less frequently. Therefore, our divergence-free SPH (DFSPH) approach is significantly faster and more stable than current state-of-the-art SPH methods for incompressible fluids. We demonstrate this in simulations with millions of fast moving particles.
» Show BibTeX
@INPROCEEDINGS{Bender2015,
author = {Jan Bender and Dan Koschier},
title = {Divergence-Free Smoothed Particle Hydrodynamics},
booktitle = {Proceedings of the 2015 ACM SIGGRAPH/Eurographics Symposium on Computer
Animation},
year = {2015},
publisher = {ACM},
doi = {http://dx.doi.org/10.1145/2786784.2786796}
}
Interactive Simulation of Rigid Body Dynamics in Computer Graphics
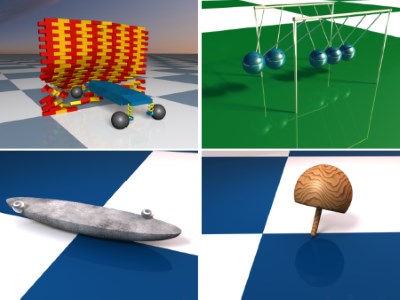
Interactive rigid body simulation is an important part of many modern computer tools, which no authoring tool nor game engine can do without. Such high performance computer tools open up new possibilities for changing how designers, engineers, modelers and animators work with their design problems. This paper is a self contained state-of-the-art report on the physics, the models, the numerical methods and the algorithms used in interactive rigid body simulation all of which have evolved and matured over the past 20 years. Furthermore, the paper communicates the mathematical and theoretical details in a pedagogical manner. This paper is not only a stake in the sand on what has been done, it also seeks to give the reader deeper insights to help guide their future research.
@article{BET2013,
title = "Interactive Simulation of Rigid Body Dynamics in Computer Graphics",
author = "Jan Bender and Kenny Erleben and Jeff Trinkle",
year = {2014},
volume = {33},
pages = {246--270},
number = {1},
journal = {Computer Graphics Forum},
doi = {10.1111/cgf.12272},
issn = {1467-8659},
url = {http://dx.doi.org/10.1111/cgf.12272}
}
A Survey on Position-Based Simulation Methods in Computer Graphics

The dynamic simulation of mechanical effects has a long history in computer graphics. The classical methods in this field discretize Newton's second law in a variety of Lagrangian or Eulerian ways, and formulate forces appropriate for each mechanical effect: joints for rigid bodies; stretching, shearing, or bending for deformable bodies; and pressure, or viscosity for fluids, to mention just a few. In the last years the class of position-based methods has become popular in the graphics community. These kinds of methods are fast, stable and controllable which make them well-suited for use in interactive environments. Position-based methods are not as accurate as force-based methods in general but they provide visual plausibility. Therefore, the main application areas of these approaches are virtual reality, computer games and special effects in movies.
This state-of-the-art report covers the large variety of position-based methods that were developed in the field of physically-based simulation. We will introduce the concept of position-based dynamics, present dynamic simulation based on shape matching and discuss data-driven upsampling approaches. Furthermore, we will present several applications for these methods.
@article{BMOTM2014,
title = "A Survey on Position-Based Simulation Methods in Computer Graphics",
author = "Jan Bender and Matthias M{\"{u}}ller and Miguel A. Otaduy and Matthias Teschner and Miles Macklin",
year = {2014},
volume = {33},
pages = {228--251},
number = {6},
journal = {Computer Graphics Forum},
doi = {10.1111/cgf.12346},
issn = {1467-8659},
url = {http://dx.doi.org/10.1111/cgf.12346}
}
Adaptive Tetrahedral Meshes for Brittle Fracture Simulation

We present a method for the adaptive simulation of brittle fracture of solid objects based on a novel reversible tetrahedral mesh refinement scheme. The refinement scheme preserves the quality of the input mesh to a large extent, it is solely based on topological operations, and does not alter the boundary, i.e. any geometric feature. Our fracture algorithm successively performs a stress analysis and increases the resolution of the input mesh in regions of high tensile stress. This results in an accurate location of crack origins without the need of a general high resolution mesh which would cause high computational costs throughout the whole simulation. A crack is initiated when the maximum tensile stress exceeds the material strength. The introduced algorithm then proceeds by iteratively recomputing the changed stress state and creating further cracks. Our approach can generate multiple cracks from a single impact but effectively avoids shattering artifacts. Once the tensile stress decreases, the mesh refinement is reversed to increase the performance of the simulation. We demonstrate that our adaptive method is robust, scalable and computes highly realistic fracture results.
» Show BibTeX
@INPROCEEDINGS{Koschier2014,
author = {Dan Koschier and Sebastian Lipponer and Jan Bender},
title = {Adaptive Tetrahedral Meshes for Brittle Fracture Simulation},
booktitle = {Proceedings of the 2014 ACM SIGGRAPH/Eurographics Symposium on Computer
Animation},
year = {2014},
publisher = {Eurographics Association},
location = {Copenhagen, Denmark}
}
Position-Based Simulation of Continuous Materials

We introduce a novel fast and robust simulation method for deformable solids that supports complex physical effects like lateral contraction, anisotropy or elastoplasticity. Our method uses a continuum-based formulation to compute strain and bending energies for two- and three-dimensional bodies. In contrast to previous work, we do not determine forces to reduce these potential energies, instead we use a position-based approach. This combination of a continuum-based formulation with a position-based method enables us to keep the simulation algorithm stable, fast and controllable while providing the ability to simulate complex physical phenomena lacking in former position-based approaches. We demonstrate how to simulate cloth and volumetric bodies with lateral contraction, bending, plasticity as well as anisotropy and proof robustness even in case of degenerate or inverted elements. Due to the continuous material model of our method further physical phenomena like fracture or viscoelasticity can be easily implemented using already existing approaches. Furthermore, a combination with other geometrically motivated methods is possible.
» Show BibTeX
@ARTICLE{Bender2014,
author = {Jan Bender and Dan Koschier and Patrick Charrier and Daniel Weber},
title = {Position-Based Simulation of Continuous Materials},
journal = {Computers \& Graphics },
year = {2014},
volume = {44},
pages = {1 - 10},
number = {0},
doi = {http://dx.doi.org/10.1016/j.cag.2014.07.004},
issn = {0097-8493}
}
Position-Based Rigid Body Dynamics
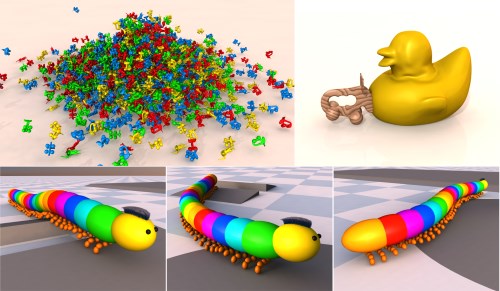
We propose a position-based approach for large-scale simulations of rigid bodies at interactive frame-rates. Our method solves positional constraints between rigid bodies and therefore integrates nicely with other position-based methods. Interaction of particles and rigid bodies through common constraints enables two-way coupling with deformables. The method exhibits exceptional performance and stability while being user-controllable and easy to implement. Various results demonstrate the practicability of our method for the resolution of collisions, contacts, stacking and joint constraints.
» Show BibTeX
@ARTICLE{Deul2014,
author = {Deul, Crispin and Charrier, Patrick and Bender, Jan},
title = {Position-Based Rigid Body Dynamics},
journal = {Computer Animation and Virtual Worlds},
year = {2014},
doi = {10.1002/cav.1614},
issn = {1546-427X},
volume = {27},
number = {2},
pages = {103--112},
keywords = {real time, rigid-body dynamics, two-way coupling, position-based dynamics},
publisher = {John Wiley \& Sons, Ltd},
url = {http://dx.doi.org/10.1002/cav.1614}
}
Efficient Self-Shadowing Using Image-Based Lighting on Glossy Surfaces

In this paper we present a novel natural illumination approach for real-time rasterization-based rendering with environment map-based high dynamic range lighting. Our approach allows to use all kinds of glossiness values for surfaces, ranging continuously from completely diffuse up to mirror-like glossiness. This is achieved by combining cosine-based diffuse, glossy and mirror reflection models in one single lighting model. We approximate this model by filter functions, which are applied to the environment map. This results in a fast, image-based lookup for the different glossiness values which gives our technique the high performance that is necessary for real-time rendering. In contrast to existing real-time rasterization-based natural illumination techniques, our method has the capability of handling high gloss surfaces with directional self-occlusion. While previous works exchange the environment map by virtual point light sources in the whole lighting and shadow computation, we keep the full image information of the environment map in the lighting process and only use virtual point light sources for the shadow computation. Our technique was developed for the usage in real-time virtual prototyping systems for garments since here typically a small scene is lit by a large environment which fulfills the requirements for image-based lighting. In this application area high performance rendering techniques for dynamic scenes are essential since a physical simulation is usually running in parallel on the same machine. However, also other applications can benefit from our approach.
» Show BibTeX
@inproceedings{Knuth2014,
author = {Martin Knuth and Christian Altenhofen and Arjan Kuijper and Jan Bender},
title = {Efficient Self-Shadowing Using Image-Based Lighting on Glossy Surfaces},
editor = {Jan Bender and Arjan Kuijper and Tatiana von Landesberger and Holger Theisel and Philipp Urban},
booktitle = {VMV 2014: Vision, Modeling & Visualization},
year = {2014},
publisher = {Eurographics Association}
}
Dynamiksimulation in der Computergraphik
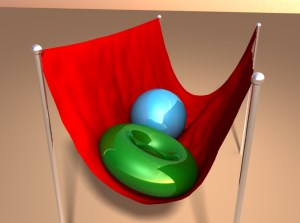
Die physikalisch-basierte Simulation von Starrkörpern und deformierbaren Festkörpern ist ein wichtiges und aktuelles Forschungsgebiet in der Computergraphik und ein essentieller Bestandteil in vielen Anwendungen, wie z.B. Virtual Prototyping, Computeranimationen, Spiele, Spezialeffekte in Filmen oder Trainingssimulatoren. Dabei stehen oft interaktive Simulationen im Vordergrund, in denen ein Benutzer in Echtzeit mit den simulierten Körpern interagieren kann. Dadurch werden hohe Anforderungen an die Geschwindigkeit und Stabilität der Simulationsverfahren gestellt.
In dieser Arbeit werden interaktive Simulationsmethoden für Mehrkörpersysteme, Textilien und inkompressible deformierbare Volumenkörper vorgestellt. Außerdem wird gezeigt, wie die Simulation durch den Einsatz GPU-basierter Methoden deutlich beschleunigt werden kann.
@PhdThesis{Bender2014,
type={Habilitation},
author = {Jan Bender},
title = {Dynamiksimulation in der Computergraphik},
school = {Karlsruhe Institute of Technology (KIT), Germany},
year = {2014},
month = jan,
doi = {10.5445/KSP/1000040123}
}
Efficient GPU data structures and methods to solve sparse linear systems in dynamics applications

We present graphics processing unit (GPU) data structures and algorithms to efficiently solve sparse linear systems that are typically required in simulations of multi-body systems and deformable bodies. Thereby, we introduce an efficient sparse matrix data structure that can handle arbitrary sparsity patterns and outperforms current state-of-the-art implementations for sparse matrix vector multiplication. Moreover, an efficient method to construct global matrices on the GPU is presented where hundreds of thousands of individual element contributions are assembled in a few milliseconds. A finite-element-based method for the simulation of deformable solids as well as an impulse-based method for rigid bodies are introduced in order to demonstrate the advantages of the novel data structures and algorithms. These applications share the characteristic that a major computational effort consists of building and solving systems of linear equations in every time step. Our solving method results in a speed-up factor of up to 13 in comparison to other GPU methods.
» Show BibTeX
@article{WebBenSchStoFel13,
author = {Weber, Daniel and Bender, Jan and Schnoes, Markus and Stork, Andr{\'e} and Fellner, Dieter},
title = {Efficient {GPU} Data Structures and Methods to Solve Sparse Linear Systems in Dynamics Applications},
year = {2013},
journal = {Computer Graphics Forum},
volume = {32},
number = {1},
publisher = {Blackwell Publishing Ltd},
issn = {1467-8659},
url = {http://dx.doi.org/10.1111/j.1467-8659.2012.03227.x},
doi = {10.1111/j.1467-8659.2012.03227.x},
pages = {16--26},
}
Position-based Methods for the Simulation of Solid Objects in Computer Graphics

The dynamic simulation of solids has a long history in computer graphics. The classical methods in this field are based on the use of forces or impulses to simulate joints between rigid bodies as well as the stretching, shearing and bending stiffness of deformable objects. In the last years the class of position-based methods has become popular in the graphics community. These kinds of methods are fast, unconditionally stable and controllable which make them well-suited for the use in interactive environments. Position-based methods are not as accurate as force based methods in general but they provide visual plausibility. Therefore, the main application areas of these approaches are virtual reality, computer games and special effects in movies.
This state of the art report covers the large variety of position-based methods that were developed in the field of deformable solids. We will introduce the concept of position-based dynamics, present dynamic simulation based on shape matching and discuss data-driven approaches. Furthermore, we will present several applications for these methods.
@inproceedings{BMOT2013,
title = "Position-based Methods for the Simulation of Solid Objects in Computer Graphics",
author = "Jan Bender and Matthias M{\"u}ller and Miguel A. Otaduy and Matthias Teschner",
year = "2013",
booktitle = "EUROGRAPHICS 2013 State of the Art Reports",
publisher = "Eurographics Association",
location = "Girona, Spain"
}
Fast and stable cloth simulation based on multi-resolution shape matching

We present an efficient and unconditionally stable method which allows the deformation of very complex stiff cloth models in real-time. This method is based on a shape matching approach which uses edges and triangles as 1D and 2D regions to simulate stretching and shearing resistance. Previous shape matching approaches require large overlapping regions to simulate stiff materials. This unfortunately also affects the bending behavior of the model. Instead of using large regions, we introduce a novel multi-resolution shape matching approach to increase only the stretching and shearing stiffness. Shape matching is performed for each level of the multi-resolution model and the results are propagated from one level to the next one. To preserve the fine wrinkles of the cloth on coarse levels of the hierarchy we present a modified version of the original shape matching method. The introduced method for cloth simulation can perform simulations in linear time and has no numerical damping. Furthermore, we show that multi-resolution shape matching can be performed efficiently on the GPU.
» Show BibTeX
@ARTICLE{Bender2013_2,
author = {Jan Bender and Daniel Weber and Raphael Diziol},
title = {Fast and stable cloth simulation based on multi-resolution shape matching},
journal = {Computers \& Graphics },
year = {2013},
volume = {37},
pages = {945 - 954},
number = {8},
doi = {http://dx.doi.org/10.1016/j.cag.2013.08.003},
issn = {0097-8493},
url = {http://www.sciencedirect.com/science/article/pii/S0097849313001283}
}
Adaptive cloth simulation using corotational finite elements

In this article we introduce an efficient adaptive cloth simulation method which is based on a reversible $\sqrt{3}$-refinement of corotational finite elements. Our novel approach can handle arbitrary triangle meshes and is not restricted to regular grid meshes which are required by other adaptive methods. Most previous works in the area of adaptive cloth simulation use discrete cloth models like mass-spring systems in combination with a specific subdivision scheme. However, if discrete models are used, the simulation does not converge to the correct solution as the mesh is refined. Therefore, we introduce a cloth model which is based on continuum mechanics since continuous models do not have this problem. We use a linear elasticity model in combination with a corotational formulation to achieve a high performance. Furthermore, we present an efficient method to update the sparse matrix structure after a refinement or coarsening step. The advantage of the $\sqrt{3}$-subdivision scheme is that it generates high quality meshes while the number of triangles increases only by a factor of 3 in each refinement step. However, the original scheme was not intended for the use in an interactive simulation and only defines a mesh refinement. In this article we introduce a combination of the original refinement scheme with a novel coarsening method to realize an adaptive cloth simulation with high quality meshes. The proposed approach allows an efficient mesh adaption and therefore does not cause much overhead. We demonstrate the significant performance gain which can be achieved with our adaptive simulation method in several experiments including a complex garment simulation.
» Show BibTeX
@ARTICLE{Bender2013,
author = {Jan Bender and Crispin Deul},
title = {Adaptive cloth simulation using corotational finite elements },
journal = {Computers \& Graphics },
year = {2013},
volume = {37},
pages = {820 - 829},
number = {7},
doi = {http://dx.doi.org/10.1016/j.cag.2013.04.008},
url = {http://www.sciencedirect.com/science/article/pii/S0097849313000605},
issn = {0097-8493}
}
Physically-Based Character Skinning

In this paper we present a novel multi-layer model for physically-based character skinning. In contrast to geometric approaches which are commonly used in the field of character skinning, physically-based methods can simulate secondary motion effects. Furthermore, these methods can handle collisions and preserve the volume of the model without the need of an additional post-process. Physically-based approaches are computationally more expensive than geometric methods but they provide more realistic results. Recent works in this area use finite element simulations to model the elastic behavior of skin. These methods require the generation of a volumetric mesh for the skin shape in a pre-processing step. It is not easy for an artist to model the different elastic behaviors of muscles, fat and skin using a volumetric mesh since there is no clear assignment between volume elements and tissue types. For our novel multi-layer model the mesh generation is very simple and can be performed automatically. Furthermore, the model contains a layer for each kind of tissue. Therefore, the artist can easily control the elastic behavior by adjusting the stiffness parameters for muscles, fat and skin. We use shape matching with oriented particles and a fast summation technique to simulate the elastic behavior of our skin model and a position-based constraint enforcement to handle collisions, volume conservation and the coupling of the skeleton with the deformable model. Position-based methods have the advantage that they are fast, unconditionally stable, controllable and provide visually plausible results.
» Show BibTeX
@inproceedings{Deul2013,
author = {Crispin Deul and Jan Bender},
title = {Physically-Based Character Skinning},
booktitle = {Virtual Reality Interactions and Physical Simulations (VRIPhys)},
year = {2013},
month = nov,
address = {Lille, France},
publisher = {Eurographics Association}
}
Multilevel Cloth Simulation using GPU Surface Sampling

Today most cloth simulation systems use triangular mesh models. However, regular grids allow many optimizations as connectivity is implicit, warp and weft directions of the cloth are aligned to grid edges and distances between particles are equal. In this paper we introduce a cloth simulation that combines both model types. All operations that are performed on the CPU use a low-resolution triangle mesh while GPU-based methods are performed efficiently on a high-resolution grid representation. Both models are coupled by a sampling operation which renders triangle vertex data into a texture and by a corresponding projection of texel data onto a mesh. The presented scheme is very flexible and allows individual components to be performed on different architectures, data representations and detail levels. The results are combined using shader programs which causes a negligible overhead. We have implemented CPU-based collision handling and a GPU-based hierarchical constraint solver to simulate systems with more than 230k particles in real-time.
» Show BibTeX
@inproceedings{Schmitt2013,
author = {Nikolas Schmitt and Martin Knuth and Jan Bender and Arjan Kuijper},
title = {Multilevel Cloth Simulation using GPU Surface Sampling},
booktitle = {Virtual Reality Interactions and Physical Simulations (VRIPhys)},
year = {2013},
month = nov,
address = {Lille, France},
publisher = {Eurographics Association}
}
Level of Detail for Real-Time Volumetric Terrain Rendering
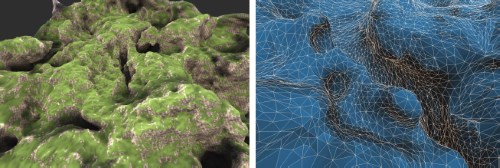
Terrain rendering is an important component of many GIS applications and simulators. Most methods rely on heightmap-based terrain which is simple to acquire and handle, but has limited capabilities for modeling features like caves, steep cliffs, or overhangs. In contrast, volumetric terrain models, e.g. based on isosurfaces can represent arbitrary topology. In this paper, we present a fast, practical and GPU-friendly level of detail algorithm for large scale volumetric terrain that is specifically designed for real-time rendering applications. Our algorithm is based on a longest edge bisection (LEB) scheme. The resulting tetrahedral cells are subdivided into four hexahedra, which form the domain for a subsequent isosurface extraction step. The algorithm can be used with arbitrary volumetric models such as signed distance fields, which can be generated from triangle meshes or discrete volume data sets. In contrast to previous methods our algorithm does not require any stitching between detail levels. It generates crack free surfaces with a good triangle quality. Furthermore, we efficiently extract the geometry at runtime and require no preprocessing, which allows us to render infinite procedural content with low memory consumption.
» Show BibTeX
@inproceedings{Scholz2013,
author = {Manuel Scholz and Jan Bender and Carsten Dachsbacher },
title = {{Level of Detail for Real-Time Volumetric Terrain Rendering}},
pages = {211-218},
URL = {http://diglib.eg.org/EG/DL/PE/VMV/VMV13/211-218.pdf},
DOI = {10.2312/PE.VMV.VMV13.211-218},
editor = {Michael Bronstein and Jean Favre and Kai Hormann},
booktitle = {VMV 2013: Vision, Modeling & Visualization},
year = {2013},
address = {Lugano, Switzerland},
publisher = {Eurographics Association}
}
Screen-Space Ambient Occlusion Using A-buffer Techniques
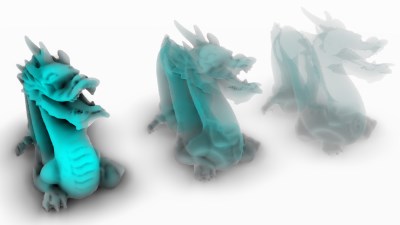
Computing ambient occlusion in screen-space (SSAO) is a common technique in real-time rendering applications which use rasterization to process 3D triangle data. However, one of the most critical problems emerging in screen-space is the lack of information regarding occluded geometry which does not pass the depth test and is therefore not resident in the G-buffer. These occluded fragments may have an impact on the proximity-based shadowing outcome of the ambient occlusion pass. This not only decreases image quality but also prevents the application of SSAO on multiple layers of transparent surfaces where the shadow contribution depends on opacity. We propose a novel approach to the SSAO concept by taking advantage of per-pixel fragment lists to store multiple geometric layers of the scene in the G-buffer, thus allowing order independent transparency (OIT) in combination with high quality, opacity-based ambient occlusion (OITAO). This A-buffer concept is also used to enhance overall ambient occlusion quality by providing stable results for low-frequency details in dynamic scenes. Furthermore, a flexible compression-based optimization strategy is introduced to improve performance while maintaining high quality results.
» Show BibTeX
@inproceedings{Bauer2013,
author = {Fabian Bauer and Martin Knuth and Jan Bender},
title = {Screen-Space Ambient Occlusion Using A-buffer Techniques},
booktitle = {International Conference on Computer-Aided Design and Computer Graphics},
year = {2013},
month = nov,
address = {Hong Kong, China},
publisher = {IEEE}
}
Interactive Simulation of Rigid Body Dynamics in Computer Graphics

Interactive rigid body simulation is an important part of many modern computer tools. No authoring tool nor a game engine can do without. The high performance computer tools open up new possibilities for changing how designers, engineers, modelers and animators work with their design problems.
This paper is a self contained state-of-the-art report on the physics, the models, the numerical methods and the algorithms used in interactive rigid body simulation all of which has evolved and matured over the past 20 years. The paper covers applications and the usage of interactive rigid body simulation.
Besides the mathematical and theoretical details that this paper communicates in a pedagogical manner the paper surveys common practice and reflects on applications of interactive rigid body simulation. The grand merger of interactive and off-line simulation methods is imminent, multi-core is everyman's property. These observations pose future challenges for research which we reflect on. In perspective several avenues for possible future work is touched upon such as more descriptive models and contact point generation problems. This paper is not only a stake in the sand on what has been done, it also seeks to give newcomers practical hands on advices and reflections that can give experienced researchers afterthought for the future. CrashTest
@inproceedings{BETC2012,
title = "Interactive Simulation of Rigid Body Dynamics in Computer Graphics",
author = "Jan Bender and Kenny Erleben and Jeff Trinkle and Erwin Coumans",
year = "2012",
booktitle = "EUROGRAPHICS 2012 State of the Art Reports",
publisher = "Eurographics Association",
location = "Cagliari, Sardinia, Italy"
}
Efficient cloth simulation using an adaptive finite element method
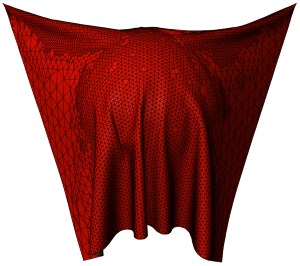
In this paper we present an efficient adaptive cloth simulation based on the sqrt(3)-refinement scheme. Our adaptive cloth model can handle arbitrary triangle meshes and is not restricted to regular grid meshes which are required by other methods. Previous works on adaptive cloth simulation often use discrete cloth models like mass-spring systems in combination with a specific subdivision scheme. The problem of such models is that the simulation does not converge to the correct solution as the mesh is refined. We propose to use a cloth model which is based on continuum mechanics since continuous models do not have this problem. In order to perform an efficient simulation we use a linear elasticity model in combination with a corotational formulation.
The sqrt(3)-subdivision scheme has the advantage that it generates high quality meshes while the number of triangles increases only by a factor of 3 in each refinement step. However, the original scheme only defines a mesh refinement. Therefore, we introduce an extension to support the coarsening of our simulation model as well. Our proposed mesh adaption can be performed efficiently and therefore does not cause much overhead. In this paper we will show that a significant performance gain can be achieved by our adaptive method.
@inproceedings{Bender12,
author = {Jan Bender and Crispin Deul},
title = {Efficient Cloth Simulation Using an Adaptive Finite Element Method},
booktitle = {Virtual Reality Interactions and Physical Simulations (VRIPhys)},
isbn = {978-3-905673-96-8},
year = {2012},
month = dec,
address = {Darmstadt, Germany},
publisher = {Eurographics Association},
DOI = {10.2312/PE/vriphys/vriphys12/021-030},
pages = {21-30}
}
Robust Real-Time Deformation of Incompressible Surface Meshes

We introduce an efficient technique for robustly simulating incompressible objects with thousands of elements in real-time. Instead of considering a tetrahedral model, commonly used to simulate volumetric bodies, we simply use their surfaces. Not requiring hundreds or even thousands of elements in the interior of the object enables us to simulate more elements on the surface, resulting in high quality deformations at low computation costs. The elasticity of the objects is robustly simulated with a geometrically motivated shape matching approach which is extended by a fast summation technique for arbitrary triangle meshes suitable for an efficient parallel computation on the GPU. Moreover, we present an oscillation-free and collision-aware volume constraint, purely based on the surface of the incompressible body. The novel heuristic we propose in our approach enables us to conserve the volume, both globally and locally. Our volume constraint is not limited to the shape matching method and can be used with any method simulating the elasticity of an object. We present several examples which demonstrate high quality volume conserving deformations and compare the run-times of our CPU implementation, as well as our GPU implementation with similar methods.
SCA 2011 Honorable Mention
» Show BibTeX
@INPROCEEDINGS{Diziol2011,
author = {Raphael Diziol and Jan Bender and Daniel Bayer},
title = {Robust Real-Time Deformation of Incompressible Surface Meshes},
booktitle = {Proceedings of the 2011 ACM SIGGRAPH/Eurographics Symposium on Computer
Animation},
year = {2011},
publisher = {Eurographics Association},
location = {Vancouver, Canada}
}
Simulating inextensible cloth using locking-free triangle meshes

This paper presents an efficient method for the dynamic simulation of inextensible cloth. The triangle mesh for our cloth model is simulated using an impulse-based approach which is able to solve hard constraints. Using hard distance constraints on the edges of the triangle mesh removes too many degrees of freedom, resulting in a rigid motion. This is known as the locking problem which is typically solved by using rectangular meshes in existing impulse-based simulations. We solve this problem by using a nonconforming representation for the simulation model which unfortunately results in a discontinuous mesh. Therefore, we couple the original conforming mesh with the nonconforming elements and use it for collision handling and visualization.
@inproceedings{Bender11,
author = {Jan Bender and Raphael Diziol and Daniel Bayer},
title = {Simulating inextensible cloth using locking-free triangle meshes},
booktitle = {Virtual Reality Interactions and Physical Simulations (VRIPhys)},
year = {2011},
month = dec,
address = {Lyon (France)},
pages = {11-17}
}
Volume Conserving Simulation of Deformable Bodies
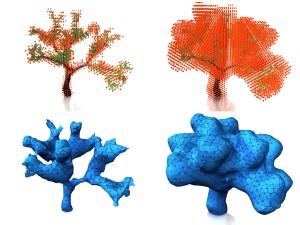
We present a new method for simulating volume conserving deformable bodies using an impulse-based approach. In order to simulate a deformable body a tetrahedral model is generated from an arbitrary triangle mesh. All resulting tetrahedrons are assigned to volume constraints which ensure the conservation of the total volume. For the simulation of such a constraint impulses are computed and applied to the particles of the assigned tetrahedrons. The algorithm is easy to implement and ensures exact volume conservation in each simulation step.
@inproceedings{Diziol09,
author = {Raphael Diziol and Jan Bender and Daniel Bayer},
title = {Volume Conserving Simulation of Deformable Bodies},
booktitle = {Short Paper Proceedings of Eurographics},
year = {2009},
month = mar,
address = {Munich (Germany)}
}
Simulating Almost Incompressible Deformable Objects

We present a new method for simulating almost incompressible deformable objects. A tetrahedral model is used to represent and restore the volume during the simulation. The new constraint computes impulses in the onering of each vertex of the tetrahedral model, in order to conserve the initial volume. With different parameters, the presented method can handle a large variety of different deformation behaviors, ranging from stiff to large deformations and even plastic deformations. The algorithm is easy to implement and reduces the volume error to less than 1% in most situations, even when large deformations are applied.
@inproceedings{Diziol09,
author = {Raphael Diziol and Daniel Bayer and Jan Bender},
title = {Simulating Almost Incompressible Deformable Objects},
booktitle = {Virtual Reality Interactions and Physical Simulations (VRIPhys)},
year = {2009},
month = nov,
address = {Karlsruhe (Germany)},
pages = {31-37}
}
Optimized impulse-based dynamic simulation

The impulse-based dynamic simulation is a recent method to compute physically based simulations. It supports the simulation of rigid-bodies and particles connected by all kinds of implicit constraints. In recent years the impulse-based dynamic simulation has been more and more used to simulate deformable bodies as well. These simulations create new requirements for the runtime of the method because very large systems of connected particles have to be simulated to get results of high quality. In this paper several runtime optimizations for the impulse-based dynamic simulation are presented. They allow to compute the same simulations at a fraction of time needed for the original method. Therefore, larger systems or simulations with increased accuracy can be simulated in realtime.
@inproceedings{Bayer09,
author = {Daniel Bayer and Raphael Diziol and Jan Bender},
title = {Optimized Impulse-Based Dynamic Simulation},
booktitle = {Virtual Reality Interactions and Physical Simulations (VRIPhys)},
year = {2009},
month = nov,
address = {Karlsruhe (Germany)},
pages = {125-133}
}
Dynamic simulation of inextensible cloth
In this paper an impulse-based method for cloth simulation is presented. The simulation of cloth is required in different application areas like computer animation, virtual reality or computer games. Simulation methods often assume that cloth is an elastic material. With this assumption the simulation can be performed very efficiently using spring forces. The problem is that many textiles cannot be stretched significantly. A realistic simulation of these textiles with spring forces leads to stiff differential equations which cause a deterioration of performance. The impulse-based method described in this paper solves this problem and allows the realistic simulation of inelastic textiles.
@article{Bender2009,
author = {Jan Bender and Daniel Bayer and Raphael Diziol},
title = {Dynamic simulation of inextensible cloth},
journal = {IADIS International Journal on Computer Science and Information Systems},
volume = {4},
number = {2},
year = {2009},
pages = {86--102}
}
Impulse-based dynamic simulation on the GPU

In this paper a new, efficient method for dynamic simulation on the GPU is presented. The method is based on an impulse-based approach which is an ideal candidate to simulate on limited hardware due to its simplicity. The proposed method shows how the impulse-based dynamic simulation can benefit from the highly parallel structure of the GPU without suffering too much losses by its limitations. This is achieved by the use of a new way to solve constraints. Most parts of the actual computation can be done in parallel, using only a few number of operations. This allows the implementation to run on a wide range of graphics boards.
@inproceedings{Bayer09,
author = {Daniel Bayer and Jan Bender and Raphael Diziol},
title = {Impulse-based dynamic simulation on the GPU},
booktitle = {Computer Graphics and Visualization (CGV 2009) - IADIS Multi Conference on Computer Science and Information Systems},
year = {2009},
month = jun,
address = {Algarve (Portugal)}
}
Parallel simulation of inextensible cloth
This paper presents an efficient simulation method for parallel cloth simulation. The presented method uses an impulse-based approach for the simulation. Cloth simulation has many application areas like computer animation, computer games or virtual reality. Simulation methods often make the assumption that cloth is an elastic material. In this way the simulation can be performed very efficiently by using spring forces. These methods disregard the fact that many textiles cannot be stretched significantly. The simulation of inextensible textiles with methods based on spring forces leads to stiff differential equations which cause a loss of performance. In contrast to that, in this paper a method is presented that simulates cloth by using impulses. The mesh of a cloth model is subdivided into strips of constraints. The impulses for each strip can be computed in linear time. The strips that have no common particle are independent from each other and can be solved in parallel. The impulse-based method allows the realistic simulation of inextensible textiles in real-time.
@inproceedings{Bender08,
author = {Jan Bender and Daniel Bayer},
title = {Parallel simulation of inextensible cloth},
booktitle = {Virtual Reality Interactions and Physical Simulations (VRIPhys)},
year = {2008},
month = nov,
address = {Grenoble (France)},
pages = {47-56}
}
Semantic representation of complex building structures

In this paper we present an abstract semantic representation that is suitable for complex buildings. Facades with high-level detail are required in several domains, e.g. visualization of architectural settings and archaeological sites as well as computer animations. In order to support the user’s modeling task, besides geometrical data structural information like spatial relations is required. This supplementary information represents the semantics of the model. Therefore the model description must incorporate the geometry and the semantics. Such a description allows a partial automation of the modeling process, e.g. adjacent and nested elements are adjusted automatically. An abstract model representation with integrated semantics is presented in this paper and it is shown that it facilitates the modeling task significantly.
@inproceedings{Finkenzeller08,
author = {Dieter Finkenzeller and Jan Bender},
title = {Semantic representation of complex building structures},
booktitle = {Computer Graphics and Visualization (CGV 2008) - IADIS Multi Conference on Computer Science and Information Systems},
year = {2008},
month = jul,
address = {Amsterdam (Netherlands)}
}
Impulse-based simulation of inextensible cloth
In this paper an impulse-based method for cloth simulation is presented. The simulation of cloth is required in different application areas like computer animation, virtual reality or computer games. Simulation methods often assume that cloth is an elastic material. With this assumption the simulation can be performed very efficiently using spring forces. The problem is that many textiles cannot be stretched significantly. A realistic simulation of these textiles with spring forces leads to stiff differential equations which cause a deterioration of performance. The impulse-based method described in this paper solves this problem and allows the realistic simulation of inelastic textiles.
@inproceedings{Bender08,
author = {Jan Bender and Daniel Bayer},
title = {Impulse-based simulation of inextensible cloth},
booktitle = {Computer Graphics and Visualization (CGV 2008) - IADIS Multi Conference on Computer Science and Information Systems},
year = {2008},
month = jul,
address = {Amsterdam (Netherlands)}
}
Impulsbasierte Dynamiksimulation von Mehrkörpersystemen in der virtuellen Realität
Die dynamische Simulation gewinnt im Bereich der virtuellen Realität immer mehr an Bedeutung. Sie ist ein wichtiges Hilfsmittel, um den Grad der Immersion des Benutzers in eine virtuelle Welt zu erhöhen. In diesem Anwendungsbereich ist die Geschwindigkeit des verwendeten Simulationsverfahrens entscheidend. Weitere Anforderungen an das Verfahren sind unter anderem Genauigkeit, Stabilität und eine einfache Implementierung. In dieser Arbeit wird ein neues impulsbasiertes Verfahren für die dynamische Simulation von Mehrkörpersystemen vorgestellt. Dieses erfüllt, im Gegensatz zu klassischen Verfahren, alle Anforderungen der virtuellen Realität. Das vorgestellte Verfahren arbeitet ausschließlich mit Impulsen, um mechanische Gelenke, Kollisionen und bleibende Kontakte mit Reibung zu simulieren.
@inproceedings{Bender08,
author = {Jan Bender},
title = {Impulsbasierte Dynamiksimulation von Mehrkörpersystemen in der virtuellen Realität},
booktitle = {GI-Edition Lecture Notes in Informatics (LNI) - Ausgezeichnete Informatikdissertationen 2007},
year = {2008},
pages = {21-30}
}
Vergleich der impulsbasierten Dynamiksimulation mit der Lagrange-Faktoren-Methode
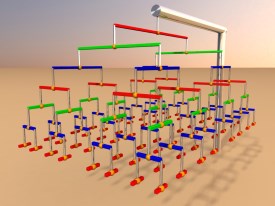
Eine der am weitesten verbreiteten Methoden zur Simulation von mechanischen Starrkörpersystemen ist die Lagrange-Faktoren-Methode (LFM). Die impulsbasierte Dynamiksimulation ist ein neuer alternativer Ansatz zur Simulation solcher Systeme. Durch den direkten Vergleich werden in dieser Arbeit die Vor- und Nachteile der beiden Methoden aufgezeigt. Dazu wird neben einer Laufzeit- und Genauigkeitsmessung zusätzlich ein informeller Vergleich durchgeführt und die Ergebnisse diskutiert.
@inproceedings{Bayer08,
author = {Daniel Bayer and Jan Bender},
title = {Vergleich der impulsbasierten Dynamiksimulation mit der Lagrange-Faktoren-Methode},
booktitle = {5. Workshop "Virtuelle und Erweiterte Realität der Fachgruppe VR/AR"},
year = {2008},
month = sep,
address = {Magdeburg (Germany)},
pages = {185-196}
}
Design of a dynamic simulation system for VR applications
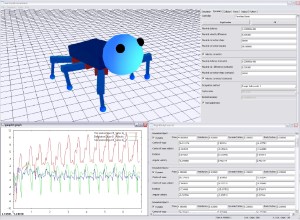
A dynamic simulation system for VR applications consists of multiple parts. The first task that must be accomplished is the generation of complex dynamic models. A 3D modelling tool is required that supports the definition of joint constraints and dynamic parameters. For the dynamic simulation of the generated models a modular simulator is required. This simulator must handle constrained models, detect and resolve collisions regarding dynamic and static friction, manage user interactions and provide the possibility of extensions. It also requires an interface for the output of the simulation data. There exist several different methods for the dynamic simulation of joint constraints, for collision detection and for the handling of collisions and resting contacts with friction. The simulation system should support multiple of these methods and provide the possibility to exchange them at runtime.
@TechReport{Bender08_13,
author = "Jan Bender",
title = "Design of a dynamic simulation system for VR applications",
institution = "University of Karlsruhe",
year = "2008",
type = "Technical Report",
number = "13"
}
Impulse-based dynamic simulation in linear time

This paper describes an impulse-based dynamic simulation method for articulated bodies which has a linear time complexity. Existing linear-time methods are either based on a reduced-coordinate formulation or on Lagrange multipliers. The impulse-based simulation has advantages over these well-known methods. Unlike reduced-coordinate methods, it handles nonholonomic constraints like velocity-dependent ones and is very easy to implement. In contrast to Lagrange multiplier methods the impulse-based approach has no drift problem and an additional stabilisation is not necessary. The presented method computes a simulation step in O(n) time for acyclic multi-body systems containing equality constraints. Closed kinematic chains can be handled by dividing the model into different acyclic parts. Each of these parts is solved independently from each other. The dependencies between the single parts are solved by an iterative method. In the same way inequality constraints can be integrated in the simulation process in order to handle collisions and permanent contacts with dynamic and static friction.
@article{Bender07,
author = {Jan Bender},
title = {Impulse-based dynamic simulation in linear time},
journal = {Computer Animation and Virtual Worlds},
volume = {18},
number = {4-5},
year = {2007},
issn = {1546-4261},
pages = {225--233},
doi = {http://dx.doi.org/10.1002/cav.v18:4/5},
publisher = {John Wiley and Sons Ltd.},
address = {Chichester, UK, UK},
}
Impulsbasierte Dynamiksimulation von Mehrkörpersystemen in der virtuellen Realität
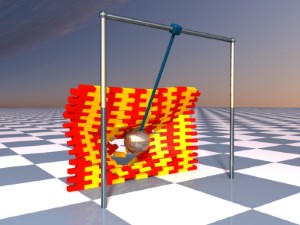
Die dynamische Simulation gewinnt im Bereich der virtuellen Realität immer mehr an Bedeutung. Sie ist ein wichtiges Hilfsmittel, um den Grad der Immersion des Benutzers in eine virtuelle Welt zu erhöhen. In diesem Anwendungsbereich ist die Geschwindigkeit des verwendeten Simulationsverfahrens entscheidend. Weitere Anforderungen an das Verfahren sind unter anderem Genauigkeit, Stabilität und eine einfache Implementierung.
In dieser Arbeit wird ein neues impulsbasiertes Verfahren für die dynamische Simulation von Mehrkörpersystemen vorgestellt. Dieses erfüllt, im Gegensatz zu klassischen Verfahren, alle Anforderungen der virtuellen Realität. Das vorgestellte Verfahren arbeitet ausschließlich mit Impulsen, um mechanische Gelenke, Kollisionen und bleibende Kontakte mit Reibung zu simulieren.
@PhdThesis{Bender07,
author = {Jan Bender},
title = {Impulsbasierte Dynamiksimulation von Mehrk{\"o}rpersystemen in der virtuellen Realit{\"a}t},
school = {University of Karlsruhe, Germany},
year = {2007},
month = feb,
}
Constraint-based collision and contact handling using impulses
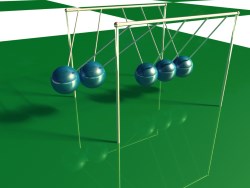
In this paper a new method for handling collisions and permanent contacts between rigid bodies is presented. Constraint-based methods for computing contact forces with friction provide a high degree of accuracy. The computation is often transformed into an optimization problem and solved with techniques like linear or quadratic programming. Impulse-based methods compute impulses to prevent colliding bodies from interpenetrating. The determination of these impulses is simple and fast. The impulse-based methods are very efficient but they are less accurate than the constraint-based methods because they resolve only one contact between two colliding bodies at the same time. The presented method uses a constraint-based approach. It can handle multiple contacts between two colliding bodies at the same time. For every collision and contact a non-penetration constraint is defined. These constraints are satisfied by iteratively computing impulses. In the same iteration loop impulses for dynamic and static friction are determined. The new method provides the accuracy of a constraint-based method and is efficient and easy to implement like an impulse-based one.
@inproceedings{Bender06,
author = {Jan Bender and Alfred Schmitt},
title = {Constraint-based collision and contact handling using impulses},
booktitle = {Proceedings of the 19th international conference on computer animation and social agents},
year = {2006},
month = jul,
address = {Geneva (Switzerland)},
pages = {3-11}
}
Fast Dynamic Simulation of Multi-Body Systems Using Impulses
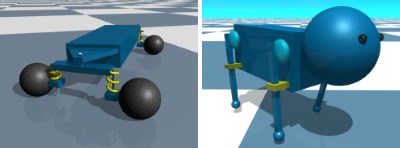
A dynamic simulation method for multi-body systems is presented in this paper. The special feature of this method is that it satisfies all given constraints by computing impulses. In each simulation step the joint states after the step are predicted. In order to obtain valid states after the simulation step, impulses are computed and applied to the connected bodies. Since a valid joint state is targeted exactly, there is no drift as the simulation proceeds in time and so no additional stabilisation is required. In previous approaches the impulses for a multi-body system were computed iteratively. Since dependencies between joints were not taken into account, the simulation of complex models was slow. A novel method is presented that uses a system of linear equations to describe these dependencies. By solving this typically sparse system the required impulses are determined. This method allows a very fast simulation of complex multi-body systems.
@inproceedings{Bender06,
author = {Jan Bender and Alfred Schmitt},
title = {Fast Dynamic Simulation of Multi-Body Systems Using Impulses},
booktitle = {Virtual Reality Interactions and Physical Simulations (VRIPhys)},
year = {2006},
month = nov,
address = {Madrid (Spain)},
pages = {81-90}
}
Feature-based decomposition of facades
Due to advances in computer hardware, virtual environments become significantly larger and more complex. Therefore the modeling of virtual worlds, e.g. for computer animation and games becomes increasingly time and resource consuming.
In architectural settings façade features are influenced by the underlying geometrical structure or even by other façade structures, e.g. façade edges made of large stones influence the adjacent walls. To achieve an aesthetic look of the façade adjacent structures must be seamlessly aligned.
The modeling of such structures is a tedious work. With our approach only a few basic parameters are needed to create highly detailed façades. This relieves the designer of the burden of difficult modeling tasks and gives him more high level control.
In this paper we present a strategy for a floor plan representation that permits arbitrary floor plan outlines. This simplifies the roof generation for different roof types in an easy way to achieve an aesthetic goal. Based on the floor plan representation we describe a hierarchical decomposition of architectural façade features. With an order relation on it we represent the interdependencies between the façade features and introduce a geometry generator for them.
With our approach every building in a large VR city will look different but can have a high level on architectural details.
@inproceedings{finken05,
author = {Dieter Finkenzeller and Jan Bender and Alfred Schmitt},
booktitle = {Research in Interactive Design: Proceedings of Virtual Concept 2005},
editor = {Xavier Fischer and Daniel Coutellier},
title = {Feature-based decomposition of fa\c{c}ades},
publisher = {Springer},
year = {2005},
address = {Biarritz, France}
}
An impulse-based dynamic simulation system for VR applications
This paper describes a system for dynamic simulation of linked rigid bodies in real-time. The system was developed to simulate mechanical behaviour in VR applications. An extension for a 3D modelling tool was developed which provides the possibility to model a VR scene including the geometries and mechanical parameters of all rigid bodies and the properties of the joints between them easily. For the dynamic simulation an impulse-based method is used. The distinguishing feature of this method is that all kind of constraints are satisfied with the iterative computation of impulses. The advantage of this iterative technique is that it is fast and accurate results can be achieved. The dynamic simulation system uses efficient collision detection methods. For every collision that is detected a contact region between the objects is determined to provide an accurate collision response.
@inproceedings{Bender05,
author = {Jan Bender and Dieter Finkenzeller and Alfred Schmitt},
title = {An impulse-based dynamic simulation system for {VR} applications},
booktitle = {Proceedings of Virtual Concept 2005},
year = {2005},
publisher = {Springer},
address = {Biarritz, France}
}
Impulse-Based Dynamic Simulation of Multibody Systems: Numerical Comparison with Standard Methods
At first we will give a short introduction to the new impulse-based method for dynamic simulation. Up till now impulses were frequently used to resolve collisions between rigid bodies. In the last years we have extended these techniques to simulate constraint forces. Important properties of the new impulse method are: (1) Simulation in Cartesian coordinates, (2) complete elimination of drift as known from Lagrange multiplier methods, (3) simple integration of collision and friction and (4) real time performance even for complex multibody systems like six legged walking machines. In order to demonstrate the potential of the impulse-based method, we report on numerical experiments. We compare the following dynamic simulation methods: (1) Generalized (or reduced) coordinates, (2) Lagrange multipliers without and with several stabilization methods like Baumgarte, velocity correction and projection method, (3) impulse-based methods of order 2, 4, 6, 8, and 10. We have simulated the mathematical pendulum, the double and the triple pendulum with all of these dynamic simulation methods and report on the attainable accuracy.
@inproceedings{Schmitt05Soz,
author = "Alfred Schmitt and Jan Bender",
title = "Impulse-Based Dynamic Simulation of Multibody Systems: Numerical Comparison with Standard Methods",
year = {2005},
booktitle= {Proc. Automation of Discrete Production Engineering},
adress= {Sozopol, Bulgaria},
pages ={324--329}
}
Impulse-Based Dynamic Simulation of Higher Order and Numerical Results
First, we will provide a short introduction to the impulse-based method for dynamic simulation. Till now, impulses were frequently used to resolve collisions between rigid bodies. In the last years, we have extended these techniques to simulate constraint forces. Important properties of the new impulse method are: (1) Simulation in Cartesian coordinates, (2) complete elimination of the constraint drift known from Lagrange multiplier methods, (3) simple integration of collision and friction and (4) real-time performance even for complex multibody systems like six-legged walking machines. In order to demonstrate the potential of the impulse-based method, we report on numerical experiments. We compare the following dynamic simulation methods: (1) Generalized (or reduced) coordinates, (2) the Lagrange multiplier method with and without several stabilization methods like Baumgarte, the velocity correction and a projection method, (3) impulse-based methods of integration order 2, 4, 6, 8, and 10. We have simulated the mathematical pendulum, the double and the triple pendulum with all of these dynamic simulation methods and report on the attainable accuracy. It turned out that the impulse methods of higher integration order are all of O(h^3) but have very small factors and are therefore relatively accurate. A Lagrange multiplier method fully stabilized by impulse-based techniques turned out to be the best of the Lagrange multiplier methods tested.
@TechReport{Schmitt05_21,
author = "Alfred Schmitt and Jan Bender and Hartmut Prautzsch",
title = "Impulse-Based Dynamic Simulation of Higher Order and Numerical Results",
institution = "Institut f{\"u}r Betriebs- und Dialogsysteme",
year = "2005",
type = "Technical Report",
number = "21"
}
On the Convergence and Correctness of Impulse-Based Dynamic Simulation
Impulse-based dynamic simulation using the iterative method results in relatively simple algorithms which are easy to implement. However, two important theoretical questions have so far still remained open: (1) In what situations does the iterative procedure converge or diverge, and how can divergence be avoided? (2) Does the impulse-based simulation converge towards the exact solution of the dynamics problem as the step size is reduced? We will completely answer both questions in this paper. First we simplify the argumentation in that we prove that for every multibody system there is a dynamically and kinematically equivalent point mass system. Hence, our results on point mass systems also apply to multibody simulations. Next we show how to replace the iterative procedures by solving systems of linear equations. We prove that the matrices of these equation systems are non-singular if redundant constraints are removed from the point mass system in question. We prove further that the solution generated by the impulse-based procedure converges towards the exact solution of the dynamics problem as the step size is reduced towards zero. The proof is based on a detailed comparison of the impulse-based integration expression and the Taylor series solution. It is well known that the latter converges to the exact solution of the dynamics problem if a Lipschitz condition is satisfied.
Comparison with the standard numerics on the basis of Lagrange multipliers shows significant advantages for the impulse-based method because the latter is completely free of drift problems, and stabilizations in the sense of Baumgarte are unnecessary. Because of the existence of methods of higher order, we can finally conclude that the impulse-based method is superior to the method with Lagrange multipliers.
@TechReport{Schmitt05_17,
author = "Alfred Schmitt and Jan Bender and Hartmut Prautzsch",
title = "On the Convergence and Correctness of Impulse-Based Dynamic Simulation",
institution = "University of Karlsruhe",
year = "2005",
type = "Technical Report",
number = "17"
}
HW3D: A tool for interactive real-time 3D visualization in GIS supported flood modelling
Large numerical calculations are made to get a prediction what damage a possible flood would cause. These results of the simulation are used to prevent further flood catastrophes. The more realistic a visualization of these calculations is the more precaution will be taken by the local authority and the citizens. This paper describes a tool and techniques to get a realistic looking, three-dimensional, easy to use, realtime visualization despite of the huge amount of data given from the flood simulation process.
@inproceedings{bender04,
author = {Jan Bender and Dieter Finkenzeller and Peter Oel},
title = {HW3D: A tool for interactive real-time 3D visualization in GIS supported flood modelling},
booktitle = {Proceedings of the 17th international conference on computer animation and social agents},
year = {2004},
address = {Geneva (Switzerland)},
pages = {305-314}
}
Ein neues Verfahren für die mechanische Simulation in VR-Systemen und in der Robotik
Für die mechanische Simulation von Robotern wurde ein neues Verfahren entwickelt. Dieses verwendet zur Lösung der Bewegungsgleichungen für gelenkgekoppelte Starrkörpersysteme kein Numerik-Verfahren wie z. B. Runge-Kutta, sondern basiert auf einer neuartigen Impulstechnik. Bei entsprechender Wahl der Parameter erlaubt das Verfahren hohe Genauigkeit und insbesondere sehr gute Energieerhaltung. Andererseits kann der Rechenzeitbedarf in kritischen Realzeitsituationen extrem reduziert werden, wenn die Parameter entsprechend angepasst werden. Dabei erweist sich das Verfahren als außerordentlich stabil und führt praktisch nie zur Desintegration der mechanischen Modelle. Deswegen ist dieses neue Simulationsverfahren speziell für Implementierungen in VRSystemen und für die Simulation komplexer, mechatronischer Systeme wie z. B. humanoider Roboter geeignet.
@inproceedings{Bender03,
author = {Jan Bender and Matthias Baas and Alfred Schmitt},
title = {Ein neues Verfahren für die mechanische Simulation in VR-Systemen und in der Robotik},
booktitle = {17. Symposium Simulationstechnik, ASIM 2003},
year = {2003},
pages = {111-116},
}
