
Publications
Interactive Simulation of Rigid Body Dynamics in Computer Graphics
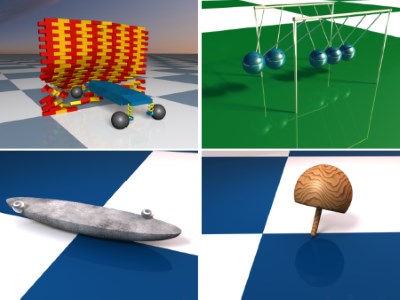
Interactive rigid body simulation is an important part of many modern computer tools, which no authoring tool nor game engine can do without. Such high performance computer tools open up new possibilities for changing how designers, engineers, modelers and animators work with their design problems. This paper is a self contained state-of-the-art report on the physics, the models, the numerical methods and the algorithms used in interactive rigid body simulation all of which have evolved and matured over the past 20 years. Furthermore, the paper communicates the mathematical and theoretical details in a pedagogical manner. This paper is not only a stake in the sand on what has been done, it also seeks to give the reader deeper insights to help guide their future research.
@article{BET2013,
title = "Interactive Simulation of Rigid Body Dynamics in Computer Graphics",
author = "Jan Bender and Kenny Erleben and Jeff Trinkle",
year = {2014},
volume = {33},
pages = {246--270},
number = {1},
journal = {Computer Graphics Forum},
doi = {10.1111/cgf.12272},
issn = {1467-8659},
url = {http://dx.doi.org/10.1111/cgf.12272}
}
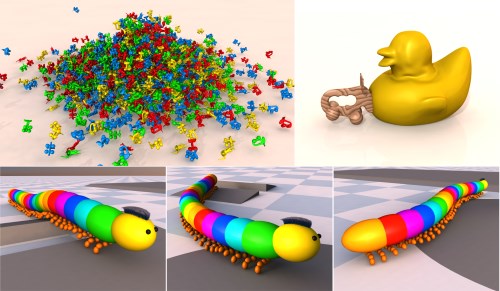
A Survey on Position-Based Simulation Methods in Computer Graphics

The dynamic simulation of mechanical effects has a long history in computer graphics. The classical methods in this field discretize Newton's second law in a variety of Lagrangian or Eulerian ways, and formulate forces appropriate for each mechanical effect: joints for rigid bodies; stretching, shearing, or bending for deformable bodies; and pressure, or viscosity for fluids, to mention just a few. In the last years the class of position-based methods has become popular in the graphics community. These kinds of methods are fast, stable and controllable which make them well-suited for use in interactive environments. Position-based methods are not as accurate as force-based methods in general but they provide visual plausibility. Therefore, the main application areas of these approaches are virtual reality, computer games and special effects in movies.
This state-of-the-art report covers the large variety of position-based methods that were developed in the field of physically-based simulation. We will introduce the concept of position-based dynamics, present dynamic simulation based on shape matching and discuss data-driven upsampling approaches. Furthermore, we will present several applications for these methods.
@article{BMOTM2014,
title = "A Survey on Position-Based Simulation Methods in Computer Graphics",
author = "Jan Bender and Matthias M{\"{u}}ller and Miguel A. Otaduy and Matthias Teschner and Miles Macklin",
year = {2014},
volume = {33},
pages = {228--251},
number = {6},
journal = {Computer Graphics Forum},
doi = {10.1111/cgf.12346},
issn = {1467-8659},
url = {http://dx.doi.org/10.1111/cgf.12346}
}
Adaptive Tetrahedral Meshes for Brittle Fracture Simulation

We present a method for the adaptive simulation of brittle fracture of solid objects based on a novel reversible tetrahedral mesh refinement scheme. The refinement scheme preserves the quality of the input mesh to a large extent, it is solely based on topological operations, and does not alter the boundary, i.e. any geometric feature. Our fracture algorithm successively performs a stress analysis and increases the resolution of the input mesh in regions of high tensile stress. This results in an accurate location of crack origins without the need of a general high resolution mesh which would cause high computational costs throughout the whole simulation. A crack is initiated when the maximum tensile stress exceeds the material strength. The introduced algorithm then proceeds by iteratively recomputing the changed stress state and creating further cracks. Our approach can generate multiple cracks from a single impact but effectively avoids shattering artifacts. Once the tensile stress decreases, the mesh refinement is reversed to increase the performance of the simulation. We demonstrate that our adaptive method is robust, scalable and computes highly realistic fracture results.
» Show BibTeX
@INPROCEEDINGS{Koschier2014,
author = {Dan Koschier and Sebastian Lipponer and Jan Bender},
title = {Adaptive Tetrahedral Meshes for Brittle Fracture Simulation},
booktitle = {Proceedings of the 2014 ACM SIGGRAPH/Eurographics Symposium on Computer
Animation},
year = {2014},
publisher = {Eurographics Association},
location = {Copenhagen, Denmark}
}
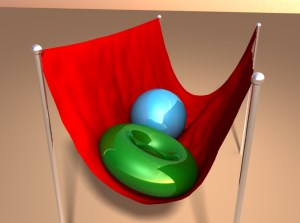
Position-Based Simulation of Continuous Materials

We introduce a novel fast and robust simulation method for deformable solids that supports complex physical effects like lateral contraction, anisotropy or elastoplasticity. Our method uses a continuum-based formulation to compute strain and bending energies for two- and three-dimensional bodies. In contrast to previous work, we do not determine forces to reduce these potential energies, instead we use a position-based approach. This combination of a continuum-based formulation with a position-based method enables us to keep the simulation algorithm stable, fast and controllable while providing the ability to simulate complex physical phenomena lacking in former position-based approaches. We demonstrate how to simulate cloth and volumetric bodies with lateral contraction, bending, plasticity as well as anisotropy and proof robustness even in case of degenerate or inverted elements. Due to the continuous material model of our method further physical phenomena like fracture or viscoelasticity can be easily implemented using already existing approaches. Furthermore, a combination with other geometrically motivated methods is possible.
» Show BibTeX
@ARTICLE{Bender2014,
author = {Jan Bender and Dan Koschier and Patrick Charrier and Daniel Weber},
title = {Position-Based Simulation of Continuous Materials},
journal = {Computers \& Graphics },
year = {2014},
volume = {44},
pages = {1 - 10},
number = {0},
doi = {http://dx.doi.org/10.1016/j.cag.2014.07.004},
issn = {0097-8493}
}
Position-Based Rigid Body Dynamics
We propose a position-based approach for large-scale simulations of rigid bodies at interactive frame-rates. Our method solves positional constraints between rigid bodies and therefore integrates nicely with other position-based methods. Interaction of particles and rigid bodies through common constraints enables two-way coupling with deformables. The method exhibits exceptional performance and stability while being user-controllable and easy to implement. Various results demonstrate the practicability of our method for the resolution of collisions, contacts, stacking and joint constraints.
» Show BibTeX
@ARTICLE{Deul2014,
author = {Deul, Crispin and Charrier, Patrick and Bender, Jan},
title = {Position-Based Rigid Body Dynamics},
journal = {Computer Animation and Virtual Worlds},
year = {2014},
doi = {10.1002/cav.1614},
issn = {1546-427X},
volume = {27},
number = {2},
pages = {103--112},
keywords = {real time, rigid-body dynamics, two-way coupling, position-based dynamics},
publisher = {John Wiley \& Sons, Ltd},
url = {http://dx.doi.org/10.1002/cav.1614}
}
Efficient Self-Shadowing Using Image-Based Lighting on Glossy Surfaces

In this paper we present a novel natural illumination approach for real-time rasterization-based rendering with environment map-based high dynamic range lighting. Our approach allows to use all kinds of glossiness values for surfaces, ranging continuously from completely diffuse up to mirror-like glossiness. This is achieved by combining cosine-based diffuse, glossy and mirror reflection models in one single lighting model. We approximate this model by filter functions, which are applied to the environment map. This results in a fast, image-based lookup for the different glossiness values which gives our technique the high performance that is necessary for real-time rendering. In contrast to existing real-time rasterization-based natural illumination techniques, our method has the capability of handling high gloss surfaces with directional self-occlusion. While previous works exchange the environment map by virtual point light sources in the whole lighting and shadow computation, we keep the full image information of the environment map in the lighting process and only use virtual point light sources for the shadow computation. Our technique was developed for the usage in real-time virtual prototyping systems for garments since here typically a small scene is lit by a large environment which fulfills the requirements for image-based lighting. In this application area high performance rendering techniques for dynamic scenes are essential since a physical simulation is usually running in parallel on the same machine. However, also other applications can benefit from our approach.
» Show BibTeX
@inproceedings{Knuth2014,
author = {Martin Knuth and Christian Altenhofen and Arjan Kuijper and Jan Bender},
title = {Efficient Self-Shadowing Using Image-Based Lighting on Glossy Surfaces},
editor = {Jan Bender and Arjan Kuijper and Tatiana von Landesberger and Holger Theisel and Philipp Urban},
booktitle = {VMV 2014: Vision, Modeling & Visualization},
year = {2014},
publisher = {Eurographics Association}
}
Dynamiksimulation in der Computergraphik
Die physikalisch-basierte Simulation von Starrkörpern und deformierbaren Festkörpern ist ein wichtiges und aktuelles Forschungsgebiet in der Computergraphik und ein essentieller Bestandteil in vielen Anwendungen, wie z.B. Virtual Prototyping, Computeranimationen, Spiele, Spezialeffekte in Filmen oder Trainingssimulatoren. Dabei stehen oft interaktive Simulationen im Vordergrund, in denen ein Benutzer in Echtzeit mit den simulierten Körpern interagieren kann. Dadurch werden hohe Anforderungen an die Geschwindigkeit und Stabilität der Simulationsverfahren gestellt.
In dieser Arbeit werden interaktive Simulationsmethoden für Mehrkörpersysteme, Textilien und inkompressible deformierbare Volumenkörper vorgestellt. Außerdem wird gezeigt, wie die Simulation durch den Einsatz GPU-basierter Methoden deutlich beschleunigt werden kann.
@PhdThesis{Bender2014,
type={Habilitation},
author = {Jan Bender},
title = {Dynamiksimulation in der Computergraphik},
school = {Karlsruhe Institute of Technology (KIT), Germany},
year = {2014},
month = jan,
doi = {10.5445/KSP/1000040123}
}
Previous Year (2013)
