
Position-Based Rigid Body Dynamics
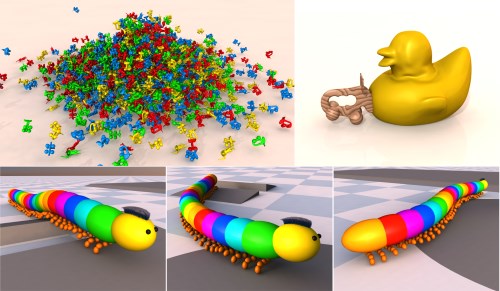
We propose a position-based approach for large-scale simulations of rigid bodies at interactive frame-rates. Our method solves positional constraints between rigid bodies and therefore integrates nicely with other position-based methods. Interaction of particles and rigid bodies through common constraints enables two-way coupling with deformables. The method exhibits exceptional performance and stability while being user-controllable and easy to implement. Various results demonstrate the practicability of our method for the resolution of collisions, contacts, stacking and joint constraints.
@ARTICLE{Deul2014,
author = {Deul, Crispin and Charrier, Patrick and Bender, Jan},
title = {Position-Based Rigid Body Dynamics},
journal = {Computer Animation and Virtual Worlds},
year = {2014},
doi = {10.1002/cav.1614},
issn = {1546-427X},
volume = {27},
number = {2},
pages = {103--112},
keywords = {real time, rigid-body dynamics, two-way coupling, position-based dynamics},
publisher = {John Wiley \& Sons, Ltd},
url = {http://dx.doi.org/10.1002/cav.1614}
}
