
Direct Position-Based Solver for Stiff Rods
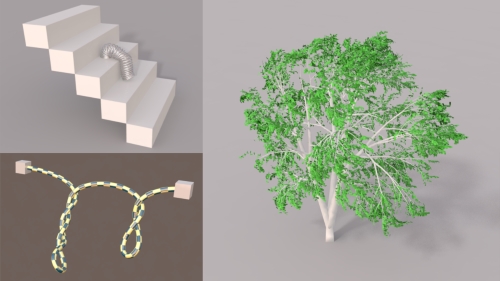
In this paper, we present a novel direct solver for the efficient simulation of stiff, inextensible elastic rods within the Position-Based Dynamics (PBD) framework. It is based on the XPBD algorithm, which extends PBD to simulate elastic objects with physically meaningful material parameters. XPBD approximates an implicit Euler integration and solves the system of non-linear equations using a non-linear Gauss-Seidel solver. However, this solver requires many iterations to converge for complex models and if convergence is not reached, the material becomes too soft. In contrast we use Newton iterations in combination with our direct solver to solve the non-linear equations which significantly improves convergence by solving all constraints of an acyclic structure (tree), simultaneously. Our solver only requires a few Newton iterations to achieve high stiffness and inextensibility. We model inextensible rods and trees using rigid segments connected by constraints. Bending and twisting constraints are derived from the well-established Cosserat model. The high performance of our solver is demonstrated in highly realistic simulations of rods consisting of multiple ten-thousand segments. In summary, our method allows the efficient simulation of stiff rods in the Position-Based Dynamics framework with a speedup of two orders of magnitude compared to the original XPBD approach.
@article{DKWB2018,
author = {Crispin Deul and Tassilo Kugelstadt and Marcel Weiler and Jan Bender},
title = {Direct Position-Based Solver for Stiff Rods},
year = {2018},
journal = {Computer Graphics Forum},
volume = {37},
number = {6},
pages = {313-324},
keywords = {physically based animation, animation, Computing methodologies → Physical simulation},
doi = {10.1111/cgf.13326},
url = {https://onlinelibrary.wiley.com/doi/abs/10.1111/cgf.13326},
eprint = {https://onlinelibrary.wiley.com/doi/pdf/10.1111/cgf.13326},
}
