
Welcome
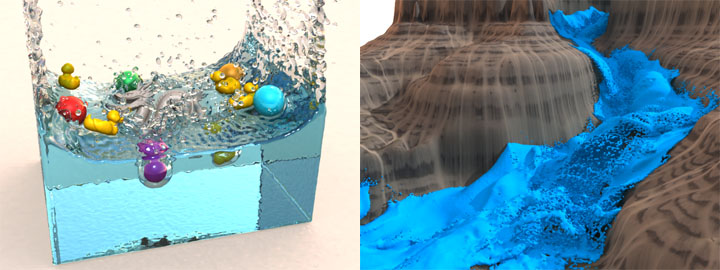
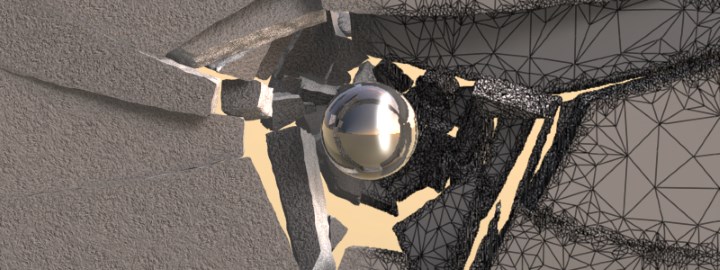

The research of the Computer Animation Group focuses on physically-based simulation of rigid body systems, deformable solids, and fluids, collision handling, cutting, fracturing, and real-time simulation methods. The main application areas include virtual prototyping, simulation in engineering, medical simulation, computer games and special effects in movies.
News
| • |
Best Paper Award Our paper "Consistent SPH Rigid-Fluid Coupling" got the best paper award at the Eurographics Vision, Modeling, and Visualization 2023. |
Sept. 29, 2023 |
| • |
Implicit Density Projection now available on GitHub! The code for our paper "Implicit Density Projection for Volume Conserving Liquids" has been implemented in the open source project Mantaflow and is now available on GitHub. Check here for the most recent version. |
July 27, 2022 |
| • |
Best Paper Award Our paper "Fast Corotated Elastic SPH Solids with Implicit Zero-Energy Mode Control" got the best paper award at the ACM SIGGRAPH / EUROGRAPHICS Symposium on Computer Animation 2021. |
Sept. 10, 2021 |
| • |
Best Paper Award Our paper "Volume Maps: An Implicit Boundary Representation for SPH" got the best paper award at the ACM SIGGRAPH Motion, Interaction and Games. |
Nov. 15, 2019 |
| • |
Best Paper Award Our paper "A Micropolar Material Model for Turbulent SPH Fluids" got the best paper award at the ACM SIGGRAPH / EUROGRAPHICS Symposium on Computer Animation. |
Aug. 15, 2017 |
| • |
SPlisHSPlasH now available on Github! SPlisHSPlasH is an open-source library for the physically-based simulation of fluids. The simulation in this library is based on the Smoothed Particle Hydrodynamics (SPH) method which is a popular meshless Lagrangian approach to simulate complex fluid effects. Check it out here! |
Nov. 17, 2016 |
Recent Publications
 Progressively Projected Newton’s Method Computer Graphics Forum (Eurographics) Newton's Method is widely used to find the solution of complex non-linear simulation problems. To guarantee a descent direction, it is common practice to clamp the negative eigenvalues of each element Hessian prior to assembly — a strategy known as Projected Newton (PN) — but this perturbation often hinders convergence. In this work, we observe that projecting only a small subset of element Hessians is sufficient to secure a descent direction. Building on this insight, we introduce Progressively Projected Newton (PPN), a novel variant of Newton's Method that uses the current iterate's residual to cheaply determine the subset of element Hessians to project. The benefit is twofold: most eigendecompositions are avoided and the global Hessian remains closer to its original form, reducing the number of Newton iterations. We compare PPN with PN and Project-on-Demand Newton (PDN) in a comprehensive set of experiments covering contact-free and contact-rich deformables, co-dimensional and rigid-body simulations, and a range of time step sizes, tolerances and resolutions. PPN reduces the amount of element projections in dynamic simulations by one order of magnitude while simultaneously improving convergence, consistently being the fastest solver in our benchmark. 
|
 HYVE: Hybrid Vertex Encoder for Neural Distance Fields IEEE Transactions on Visualization and Computer Graphics Neural shape representation generally refers to representing 3D geometry using neural networks, e.g., computing a signed distance or occupancy value at a specific spatial position. In this paper we present a neural-network architecture suitable for accurate encoding of 3D shapes in a single forward pass. Our architecture is based on a multi-scale hybrid system incorporating graph-based and voxel-based components, as well as a continuously differentiable decoder. The hybrid system includes a novel way of voxelizing point-based features in neural networks by projecting the point "feature-field" onto a grid. This projection is insensitive to local point density, and we show that it can be used to obtain smoother and more detailed reconstructions, in particular when combined with oriented point clouds as input. Our architecture also requires only a single forward pass, instead of the latent-code optimization used in auto-decoder methods. Furthermore, our network is trained to solve the well-established eikonal equation and only requires knowledge of the zero-level set for training and inference. We additionally propose a modification to the aforementioned loss function for the case that surface normals are not well defined, e.g., in the context of non-watertight surfaces and non-manifold geometry. Overall, our method consistently outperforms other baselines on the surface reconstruction task across a wide variety of datasets, while being more computationally efficient and requiring fewer parameters.
|
 Implicit Incompressible Porous Flow using SPH ACM Transactions on Graphics (SIGGRAPH Asia) We present a novel implicit porous flow solver using SPH, which maintains fluid incompressibility and is able to model a wide range of scenarios, driven by strongly coupled solid-fluid interaction forces. Many previous SPH porous flow methods reduce particle volumes as they transition across the solid-fluid interface, resulting in significant stability issues. We instead allow fluid and solid to overlap by deriving a new density estimation. This further allows us to extend SPH pressure solvers to take local porosity into account and results in strict enforcement of incompressibility. As a result, we can simulate porous flow using physically consistent pressure forces between fluid and solid. In contrast to previous SPH porous flow methods, which use explicit forces for internal fluid flow, we employ implicit non-pressure forces. These we solve as a linear system and strongly couple with fluid viscosity and solid elasticity. We capture the most common effects observed in porous flow, namely drag, buoyancy and capillary action due to adhesion. To achieve elastic behavior change based on local fluid saturation, such as bloating or softening, we propose an extension to the elasticity model. We demonstrate the efficacy of our model with various simulations that showcase the different aspects of porous flow behavior. To summarize, our system of strongly coupled non-pressure forces and enforced incompressibility across overlapping phases allows us to naturally model and stably simulate complex porous interactions.
|
