
Publications
Feature-based decomposition of facades
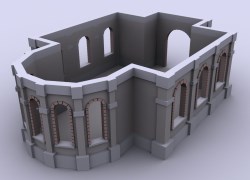
Due to advances in computer hardware, virtual environments become significantly larger and more complex. Therefore the modeling of virtual worlds, e.g. for computer animation and games becomes increasingly time and resource consuming.
In architectural settings façade features are influenced by the underlying geometrical structure or even by other façade structures, e.g. façade edges made of large stones influence the adjacent walls. To achieve an aesthetic look of the façade adjacent structures must be seamlessly aligned.
The modeling of such structures is a tedious work. With our approach only a few basic parameters are needed to create highly detailed façades. This relieves the designer of the burden of difficult modeling tasks and gives him more high level control.
In this paper we present a strategy for a floor plan representation that permits arbitrary floor plan outlines. This simplifies the roof generation for different roof types in an easy way to achieve an aesthetic goal. Based on the floor plan representation we describe a hierarchical decomposition of architectural façade features. With an order relation on it we represent the interdependencies between the façade features and introduce a geometry generator for them.
With our approach every building in a large VR city will look different but can have a high level on architectural details.
@inproceedings{finken05,
author = {Dieter Finkenzeller and Jan Bender and Alfred Schmitt},
booktitle = {Research in Interactive Design: Proceedings of Virtual Concept 2005},
editor = {Xavier Fischer and Daniel Coutellier},
title = {Feature-based decomposition of fa\c{c}ades},
publisher = {Springer},
year = {2005},
address = {Biarritz, France}
}
An impulse-based dynamic simulation system for VR applications
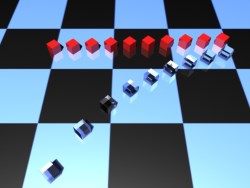
This paper describes a system for dynamic simulation of linked rigid bodies in real-time. The system was developed to simulate mechanical behaviour in VR applications. An extension for a 3D modelling tool was developed which provides the possibility to model a VR scene including the geometries and mechanical parameters of all rigid bodies and the properties of the joints between them easily. For the dynamic simulation an impulse-based method is used. The distinguishing feature of this method is that all kind of constraints are satisfied with the iterative computation of impulses. The advantage of this iterative technique is that it is fast and accurate results can be achieved. The dynamic simulation system uses efficient collision detection methods. For every collision that is detected a contact region between the objects is determined to provide an accurate collision response.
@inproceedings{Bender05,
author = {Jan Bender and Dieter Finkenzeller and Alfred Schmitt},
title = {An impulse-based dynamic simulation system for {VR} applications},
booktitle = {Proceedings of Virtual Concept 2005},
year = {2005},
publisher = {Springer},
address = {Biarritz, France}
}
Impulse-Based Dynamic Simulation of Multibody Systems: Numerical Comparison with Standard Methods
At first we will give a short introduction to the new impulse-based method for dynamic simulation. Up till now impulses were frequently used to resolve collisions between rigid bodies. In the last years we have extended these techniques to simulate constraint forces. Important properties of the new impulse method are: (1) Simulation in Cartesian coordinates, (2) complete elimination of drift as known from Lagrange multiplier methods, (3) simple integration of collision and friction and (4) real time performance even for complex multibody systems like six legged walking machines. In order to demonstrate the potential of the impulse-based method, we report on numerical experiments. We compare the following dynamic simulation methods: (1) Generalized (or reduced) coordinates, (2) Lagrange multipliers without and with several stabilization methods like Baumgarte, velocity correction and projection method, (3) impulse-based methods of order 2, 4, 6, 8, and 10. We have simulated the mathematical pendulum, the double and the triple pendulum with all of these dynamic simulation methods and report on the attainable accuracy.
@inproceedings{Schmitt05Soz,
author = "Alfred Schmitt and Jan Bender",
title = "Impulse-Based Dynamic Simulation of Multibody Systems: Numerical Comparison with Standard Methods",
year = {2005},
booktitle= {Proc. Automation of Discrete Production Engineering},
adress= {Sozopol, Bulgaria},
pages ={324--329}
}
Impulse-Based Dynamic Simulation of Higher Order and Numerical Results
First, we will provide a short introduction to the impulse-based method for dynamic simulation. Till now, impulses were frequently used to resolve collisions between rigid bodies. In the last years, we have extended these techniques to simulate constraint forces. Important properties of the new impulse method are: (1) Simulation in Cartesian coordinates, (2) complete elimination of the constraint drift known from Lagrange multiplier methods, (3) simple integration of collision and friction and (4) real-time performance even for complex multibody systems like six-legged walking machines. In order to demonstrate the potential of the impulse-based method, we report on numerical experiments. We compare the following dynamic simulation methods: (1) Generalized (or reduced) coordinates, (2) the Lagrange multiplier method with and without several stabilization methods like Baumgarte, the velocity correction and a projection method, (3) impulse-based methods of integration order 2, 4, 6, 8, and 10. We have simulated the mathematical pendulum, the double and the triple pendulum with all of these dynamic simulation methods and report on the attainable accuracy. It turned out that the impulse methods of higher integration order are all of O(h^3) but have very small factors and are therefore relatively accurate. A Lagrange multiplier method fully stabilized by impulse-based techniques turned out to be the best of the Lagrange multiplier methods tested.
@TechReport{Schmitt05_21,
author = "Alfred Schmitt and Jan Bender and Hartmut Prautzsch",
title = "Impulse-Based Dynamic Simulation of Higher Order and Numerical Results",
institution = "Institut f{\"u}r Betriebs- und Dialogsysteme",
year = "2005",
type = "Technical Report",
number = "21"
}
On the Convergence and Correctness of Impulse-Based Dynamic Simulation
Impulse-based dynamic simulation using the iterative method results in relatively simple algorithms which are easy to implement. However, two important theoretical questions have so far still remained open: (1) In what situations does the iterative procedure converge or diverge, and how can divergence be avoided? (2) Does the impulse-based simulation converge towards the exact solution of the dynamics problem as the step size is reduced? We will completely answer both questions in this paper. First we simplify the argumentation in that we prove that for every multibody system there is a dynamically and kinematically equivalent point mass system. Hence, our results on point mass systems also apply to multibody simulations. Next we show how to replace the iterative procedures by solving systems of linear equations. We prove that the matrices of these equation systems are non-singular if redundant constraints are removed from the point mass system in question. We prove further that the solution generated by the impulse-based procedure converges towards the exact solution of the dynamics problem as the step size is reduced towards zero. The proof is based on a detailed comparison of the impulse-based integration expression and the Taylor series solution. It is well known that the latter converges to the exact solution of the dynamics problem if a Lipschitz condition is satisfied.
Comparison with the standard numerics on the basis of Lagrange multipliers shows significant advantages for the impulse-based method because the latter is completely free of drift problems, and stabilizations in the sense of Baumgarte are unnecessary. Because of the existence of methods of higher order, we can finally conclude that the impulse-based method is superior to the method with Lagrange multipliers.
@TechReport{Schmitt05_17,
author = "Alfred Schmitt and Jan Bender and Hartmut Prautzsch",
title = "On the Convergence and Correctness of Impulse-Based Dynamic Simulation",
institution = "University of Karlsruhe",
year = "2005",
type = "Technical Report",
number = "17"
}
Previous Year (2004)
